Research topics
Dynamics and control for airplane and spacecraft
Study on Evaluation of Social Acceptability for the "Aerial Industrial Revolution"
While technologies related to Urban Air Mobility (UAM) have been studied worldwide in recent years, the social acceptability of UAM has not been sufficiently investigated. Therefore, we aim to develop a simulator that can evaluate the social acceptability of UAM by combining subjective evaluation using a questionnaire and objective evaluation using an analyzer based on simple electroencephalograph measurement (Kansei Analyzer). In the development of this social acceptability evaluation simulator, the discrepancy between real UAM and CG cannot be ignored. In order to properly evaluate the social acceptability of real UAM, it is necessary to reduce the discrepancy between real UAM and CG.
In this research, since it is difficult to conduct experiments using real UAMs, we will conduct simulated experiments using drones. Specifically, we will evaluate the discrepancy in sensitivity between a real drone and a CG drone using the Kansei analyzer, and aim to a simulator that can evaluate sensitivity on the same level as when exposed to a real drone.
- S. Hara, Y. Hayashi, Y. Mitsukura, and H. Kamide, Applicability of Kansei Analyzer for Noise-Induced Stress Assessment -Toward Social Acceptability Survey of Flying Cars-, Technical Journal of Advanced Mobility, Vol. 2, No. 3, pp. 31-41 (2021).
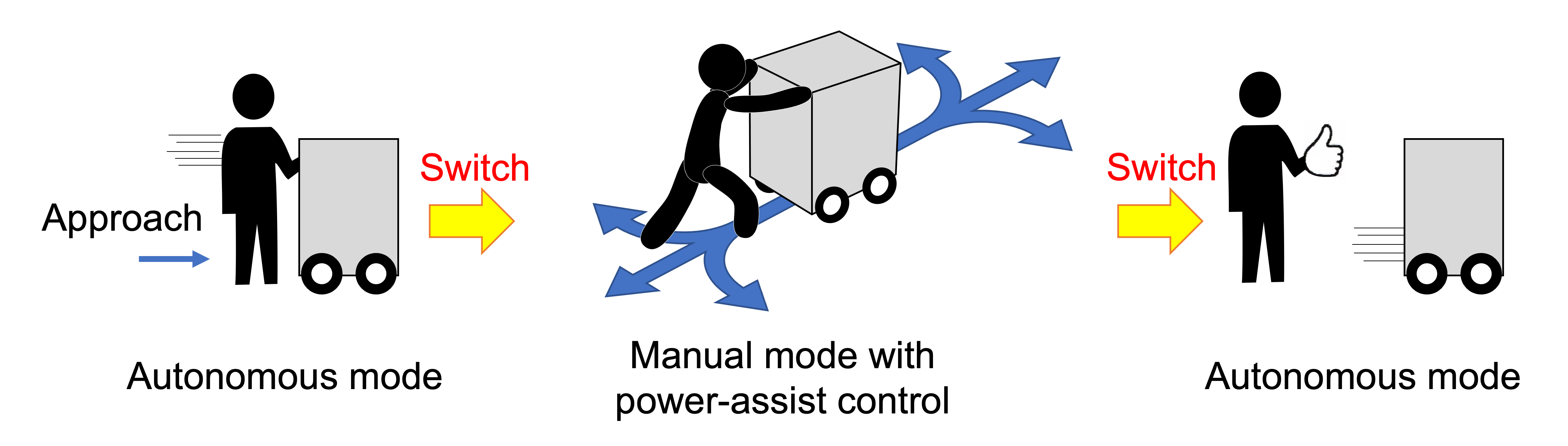
Seamless Switching Between Manual and Autonomous Navigation and Longitudinal and Turning Power Assist Control for Autonomous Mobile Robots
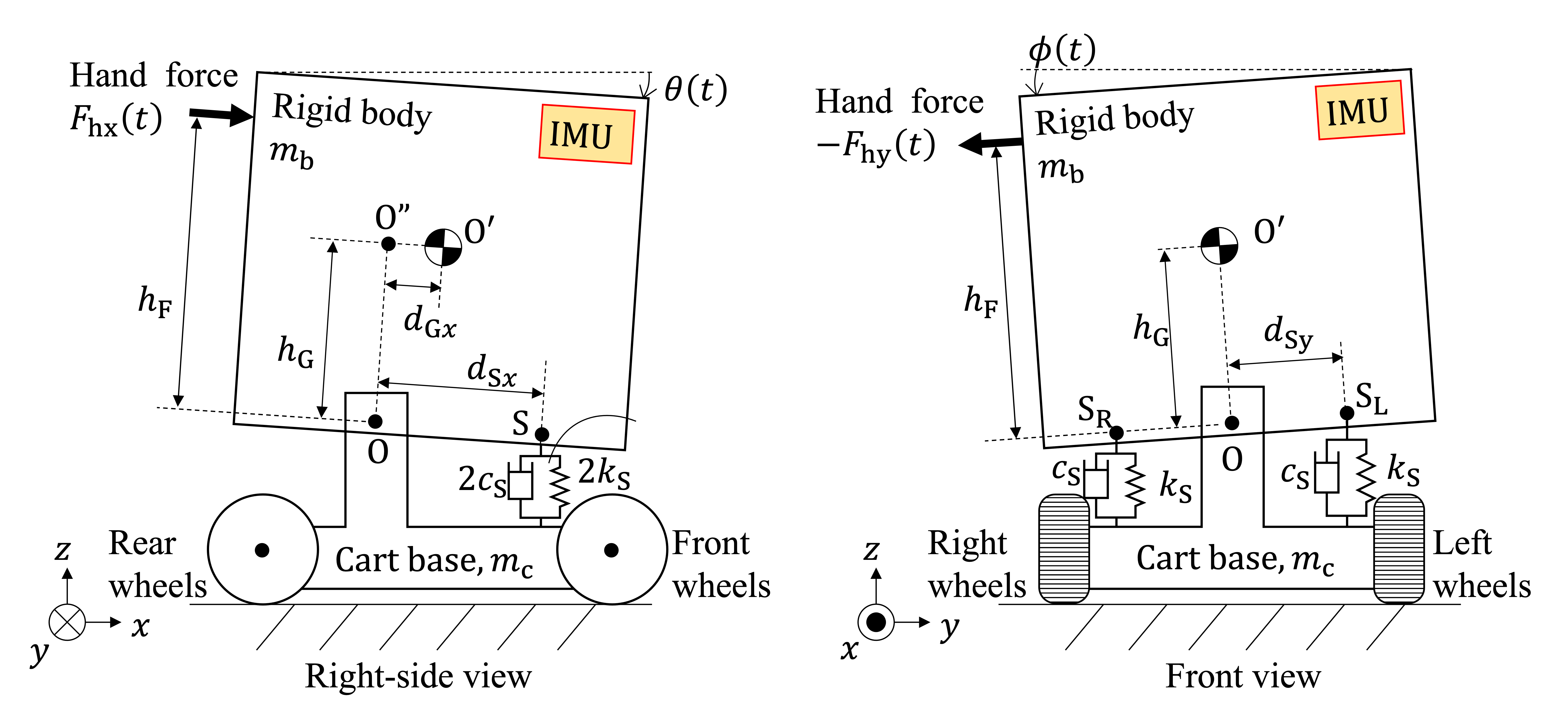
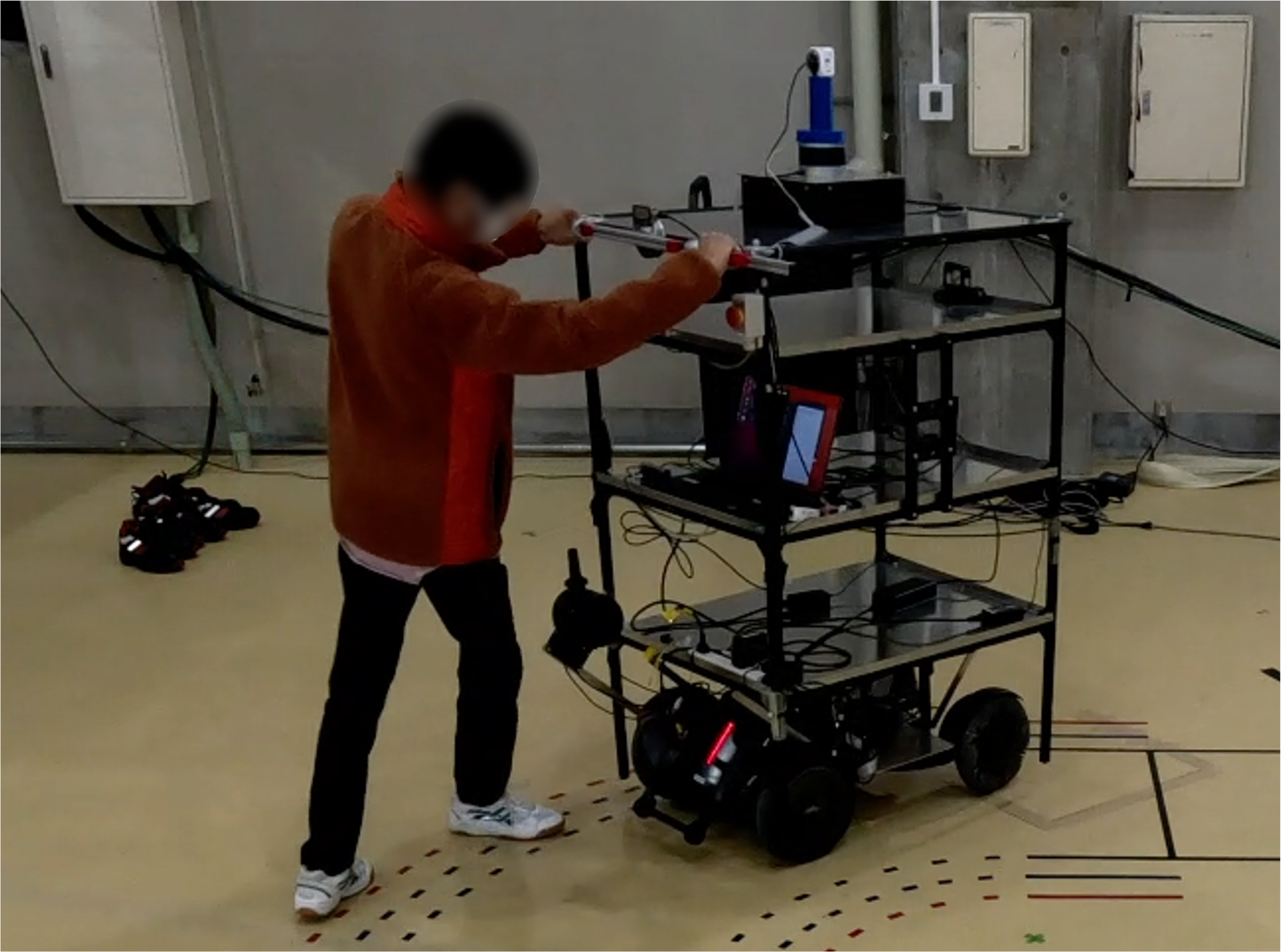
Recently, autonomous mobile robots are introduced in many factories; however, it is difficult to introduce them into aircraft manufacturing bases because of their complex situations. In the aircraft manufacturing bases, fully autonomous carrying by the robots is not required, instead, seamless switching between manual and autonomous navigation is required because workers sometimes want to control the robots manually. To achieve the requirement, the seamless navigation switching method and the power assist control in enabling manual forward, backward, and turning operations for the robots are necessary. In this work, we aim to develop these methods.
- N. G. M. Thao, S. Hirokawa, S. Hara, H. Okuda, M. Nagatsuka, N. Ogawa, and T. Suzuki, Introduction of a Manual Control Mode for Autonomous Mobile Robots to Transportation of Equipment in Manufacturing Sites of Aircraft Industry, Proceedings of the 2021 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO 2021), pp. 127-130 (2021).
- R. Sato, R. Nishida, S. Hara, H. Okuda, M. Nagatsuka, M. Tsuji, and T. Suzuki, Operability Evaluation of Manual Operation Control for Force-Sensorless Power-Assist Transport Cart, Mechatronics, Vol. 100, 103189 (2024).
Moon and Planetary Landing Dynamics and Control
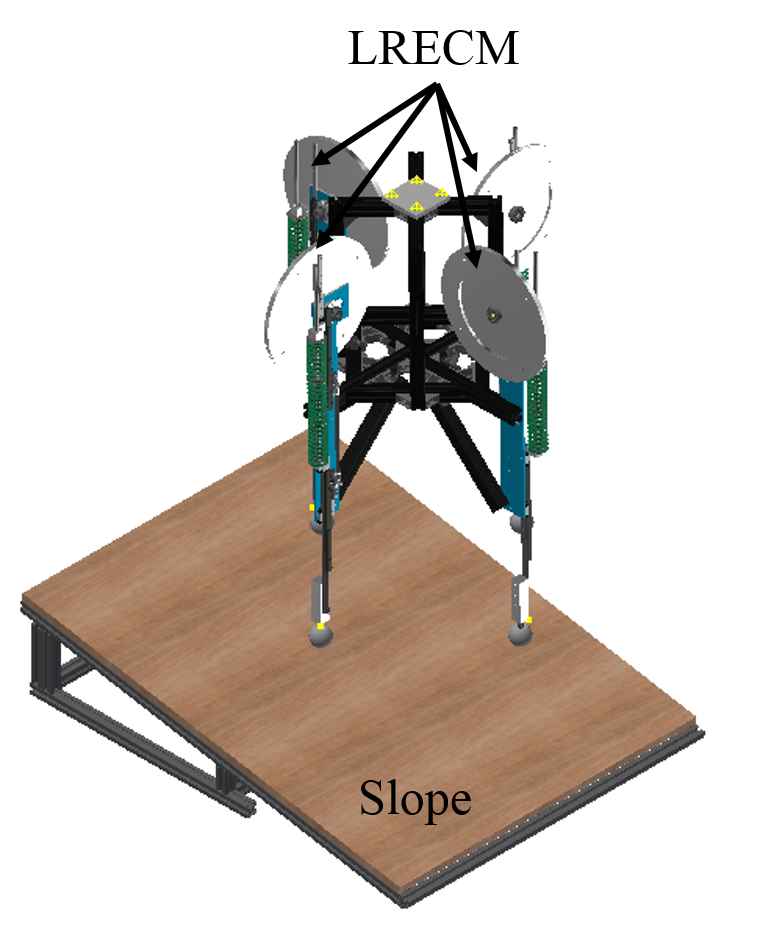
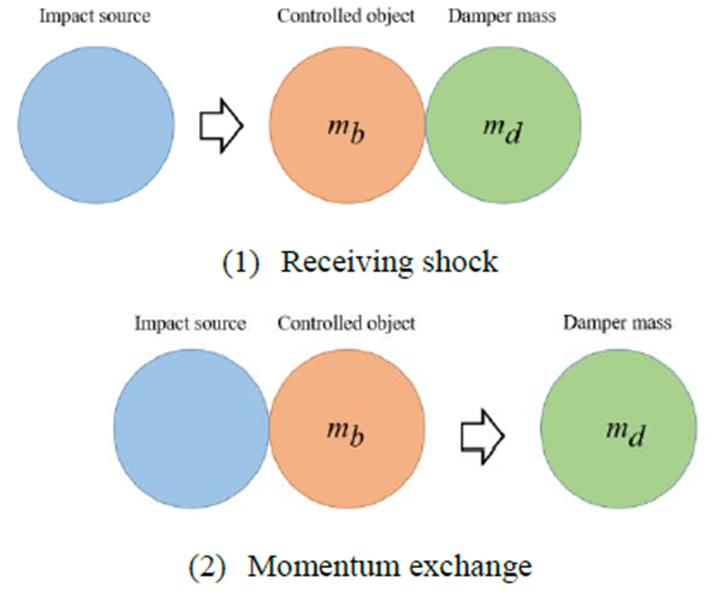
For the next generation lunar planetary exploration mission, the landing technique is very important to explore the surface of the celestial bodies. Since the scientifically important places are not suitable for landing due to the steep topography, more effective mechanisms for landing on the surface with severe condition is required. Therefore, the overturning-preventation is a major issue for the landers. To solve the problems, our research group focuses on the momentum exchange and energy conversion for shock absorbing and overturning-prevention at landing. Our group proposes the various landing mechanisms and control methods from the point of this view.
|
|
- S. Hara, K. Sugita, S. Saito, T. Maeda, and M. Otsuki, Free-Fall Landing Experiments and Simulations of Three-Dimensional Linear-Rotary-Energy-Conversion Mechanism, The 17th Space Science Symposium, P-176 (2016) (in Japanese).
- S. Hara, S. Saito, K. Sugita, and T. Maeda, Planetary Exploration Spacecraft Landing Gear with Three-Dimensional Linear-Rotary-Energy-Conversion Mechanism, The 31st International Symposium on Space Technology and Science, 2017-k-36 (2017).
- T. Maeda, T. Ozaki, S. Hara, and S. Matsui, Touchdown Dynamics of a Planetary Lander with a Translation-Rotation Motion Conversion Mechanism, Journal of Spacecraft and Rockets, Vol. 54, No. 4, pp. 973-980 (2017).
Research on Multicopter Landing Mechanisms
Unmanned Aerial Vehicles (UAVs) are widely used in many applications due to their simplicity, and compactness. The “Aerial Industrial Revolution” in Japan intends to build a delivery system, which can work after a disaster or during the pandemic, with UAVs both in the countryside and within cities. To take the missions successfully, it is crucial for the UAVs to land safely on different kinds of surfaces and under different conditions.
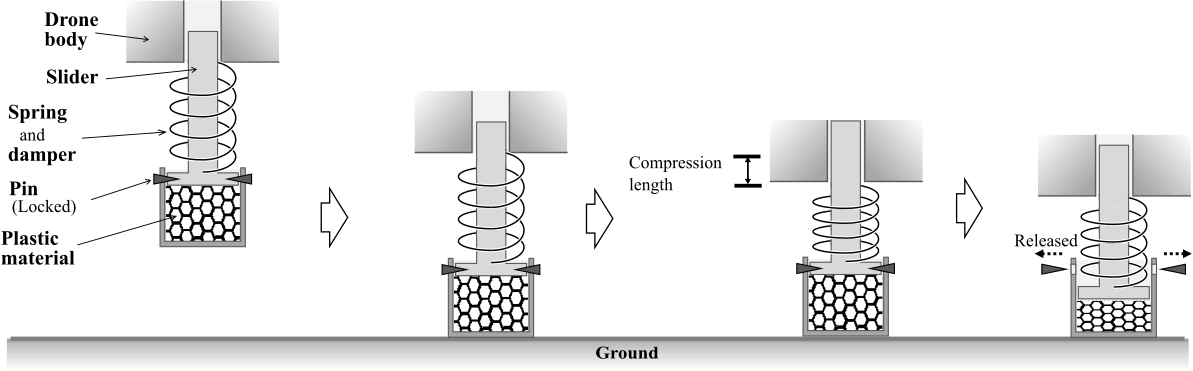
This study proposes an emergency landing system for UAVs that can achieve high performance in the event of falls from varying heights. The system consists of a spring/damper connected serially with a plastic material, which can be locked or released using a mechanical switch. When falling from a low height, only the spring/damper system is used to mitigate the impact of landing. However, in the case of a high fall, the plastic material is also engaged to further suppress rebound. The system operates as follows:
- Initially, the mechanical switch is locked, and only the spring-damper system compresses during landing.
- When the spring length reaches a threshold, the mechanical switch unlocks, and the plastic deformation part starts to deform.
- K. Niwa, S. Hara, and K. Miyata, Development of Landing Rebound Reduction Mechanism Utilizing Magnetic Damper for Multicopters, Journal of Robotics and Mechatronics, Vol. 33, No. 2, pp. 223-230 (2021).
- P. Li, R. Sato, M. Hasegawa, and S. Hara, Fundamental Study on Adaptive Shock Response Control for Emergency Landing of UAVs and Its Experimental Investigation, IEEJ Journal of Industry Applications, Vol. 13, No. 2, pp. 135–145 (2024).
- P. Li, R. Sato, and S. Hara, Analytical and Experimental Study on a Versatile Landing System with Shock Response Mechanism, Aerospace Science and Technology, Vol. 157, 109807 (2025).
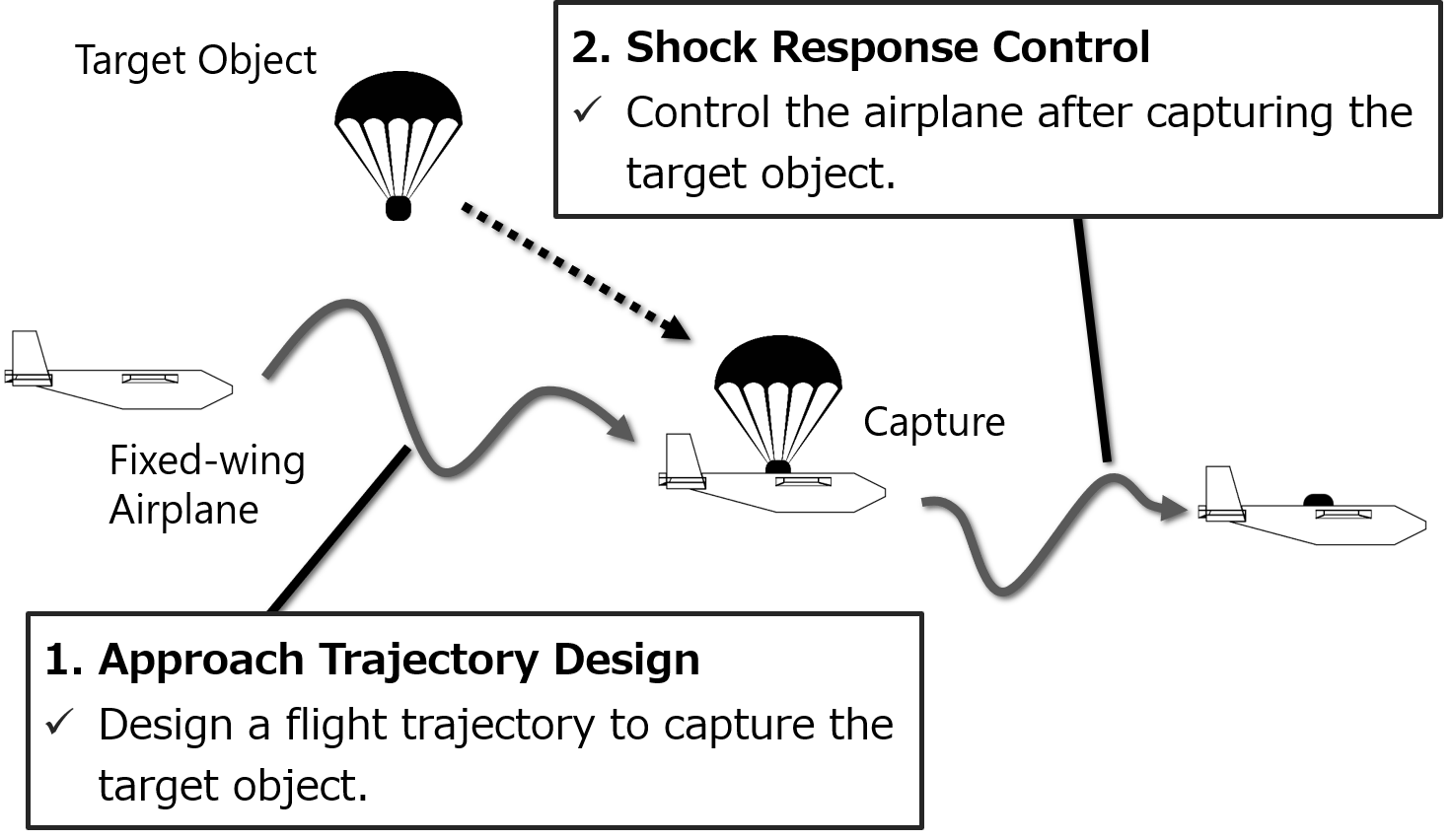
Mid-Air Retrieval of Low-Speed-Descent Objects by Fixed-Wing UAVs
Deceleration by parachute is one of the most popular ways for safety measures of low-speed-descent objects such as radiosonde balloons and failure drones. However, it is difficult to control their landing points. Moreover, they might not decelerate enough to protect people or objects on the ground. This fact might cause serious accidents.
In this research, we propose the concept of mid-air-retrieval of low-speed-descent objects using fixed-wing unmanned aerial vehicles (UAVs). Especially, we focus on a control method to achieve the concept.
- S. Takeuchi, S. Nakamura, S. Hara, and K. Miyata, Updating Final-State Control Methods Taking Input Constraints at Final Time Into Account (Adaptive Flight Trajectory Design of Fixed-Wing UAVs), Journal of Advanced Mechanical Design, Systems, and Manufacturing, Vol. 14, No. 7, JAMDSM0106 (2020).
Study on Stabilization Control of Motorcycles
Motorcycles are unstable vehicles compared to other motor vehicles which have more than four wheels. They have huge risks of fall during low-speed driving or standstill. Therefore, the improvement in the safety of motorcycles is strongly required in higher the safety of the whole traffic society. Our group studies on standing and stabilization control of motorcycles. We have been cooperating with Yamaha Motor Co., Ltd., since 2018. By combining mathematical modeling of the motorcycle and Bayesian optimization, appropriate parameters are selected to achieve self-stabilization of the motorcycle. In the future, we would like to control not just the steering but also the drive torque.
- S. Hara, M. Tsuchiya, T. Kimura, and N. Akai, Experimental Study on Low-Speed Control for Motorcycles Using SPACAR Model and Gain-Scheduling Control, J. Electr. Eng. Technol., Vol. 18, No. 3, pp.2221-2230 (2023).
- K. Muto, S. Hara, D. Koudu, T. Murakami, S. Akama, and D. Tsubakino, Efficient Controller Design Using Bayesian Optimization for Low-Speed Motorcycles Stabilization, Proceedings of the 11th IEEJ International Workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON 2025), pp. 280-285, (2025).
Establishment of a Remote Experimentation System for Inverted Pendulum Control
Due to the COVID-19 pandemic, many university courses have transitioned to online instruction, and some courses involving experiments have been cancelled due to difficulties in online implementation. In this study, we aim to establish a remote experimentation system for the control of an inverted pendulum as one of the experimental courses, with the goal of achieving simultaneous stabilization of two inverted pendulums located at remote locations between the instructor and students. Our objective is to conduct the experiment in a classroom-like atmosphere simultaneously, even though the participants are located at remote sites. This system is expected to be applicable not only to student experiments but also to remote product demonstrations.
The video demonstrates the stabilization control of two inverted pendulums installed at Nagoya University and Gifu University, approximately 50 km apart, with one pendulum at each institution. These pendulums exchange information with each other via the Internet. A hierarchical optimal control method is employed to design the control system. This method allows adjusting the trade-off between individual stability and the coordination of the two pendulums by simply modifying the weighting parameters in the evaluation function. This research also aims to enhance robustness against communication delays, structured uncertainties such as parameter variations, and unstructured uncertainties such as residual vibration modes.
- S. Hara, Y. Kurasaki, D. Tsubakino, and K. Ito, Simultaneous Experimental Classes in Multiple Universities Using Simultaneous Stabilizing Control of Internet-Connected Multiple Inverted Pendulums, Transactions of the SICE, Vol. 61, No. 1, pp. 2-11 (2025), (in Japanese).
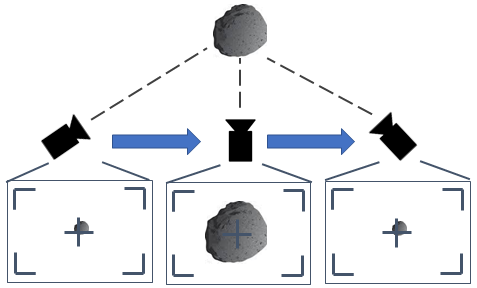
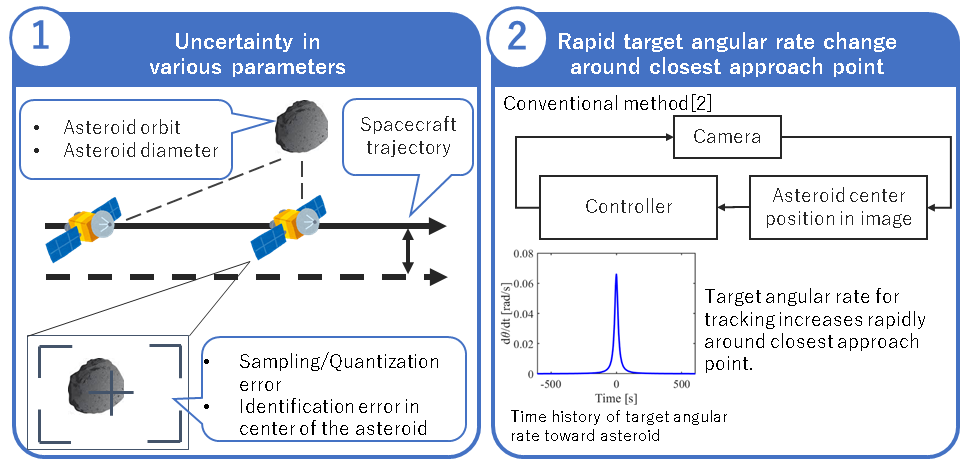
Visual Based Tracking System in Asteroid Flyby
In recent years, flyby exploration using small satellites has attracted attention to reduce costs and increase observation opportunities. Due to the limitations of onboard imagers in small satellite-based flyby exploration, achieving high-precision data acquisition requires a shorter closest approach distance and an increased relative velocity, necessitating faster and more accurate tracking. To achieve high-speed and high-precision tracking, target tracking is performed using a steering mirror that controls only the line of sight of the observation equipment. To realize such tracking, it is essential to mitigate various error factors, including modeling errors and performance variations due to temperature dependence in actuators, delays and computational costs in image processing, and optical conditions. This study aims to develop a control system capable of addressing these challenges.
- K. Miyata, S. Hara, K. Hayashi, K. Seki, and M. Iwasaki, Comparisons of Vision-Based Target Tracking Methods for Asteroid Flyby Problem, Proceedings of the 8th IEEJ International Workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON 2022), pp. 107-112 (2022).
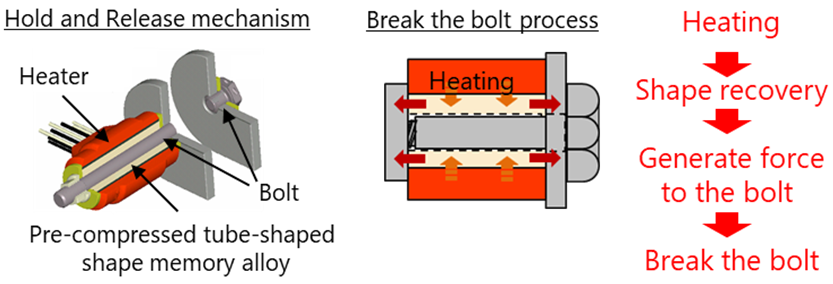
Space-use Actuator System
Shape memory alloy (SMA) is the material which has a unique characteristic. The material can convert thermal energy directly into mechanical work. With proper thermal treatment, an SMA can remember its original shape and return to its pre-deformed shape when heated, even if it reaches plastic deformation when the deformation ratio is less than its recoverability, which generates a recovering force. Recently, SMA actuators get attraction because of their low shock, high safety, reusability, and ease of handling. One typical application of these kinds of actuators for spacecraft is the holding and release mechanism. The holding and release mechanism is a mechanism that holds an object safely even against external forces, such as vibration and shock, and instantaneously generates a force to release the object at the desired time and the system used pyrotechnic devices, conventionally. Our research group is challenging to improve the performance of these kinds actuators by constructing the mathematical model of the actuator and suitable control system.
- M. Nozaki, K. Miyata, S. Hara, and M. Otsuki, A Robust Control System Against Temperature Variance for Space-Use SMA Actuators, Journal of Spacecraft and Rockets, Vol. 59, pp. 1062-1073 (2022).
Previous Topics
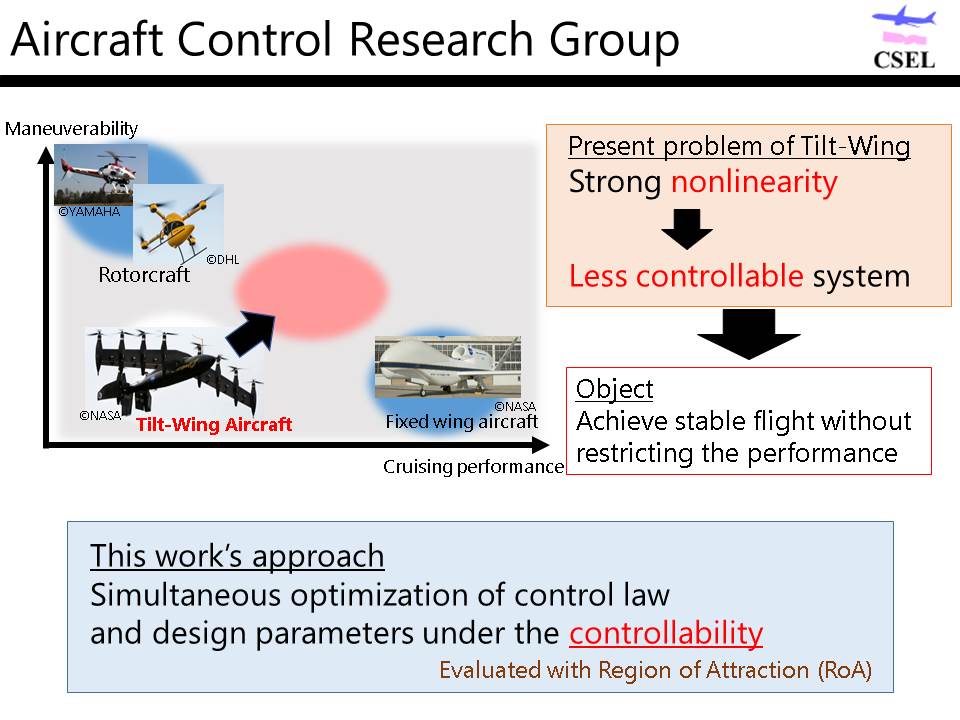
Aircraft Control
Recentlly the popularities of the Unmanned Aerial Vehicles (UAVs) are increasing for various applications such as transportation. In particular, the combination of the "Hovering capability" like helicopter, and "High-speed flight ability" like a commercial plane is required. These abilities can realize the transportation between the isolated islands and more extensive and highly accurate environmental observation, for example. The Vertical takeoff and landing aircraft (VTOL) are attracting attention as the aircraft that realize the functions. Our research group focuses on the Tilt-Wing aircraft, one of the VTOL machines. This aircraft realizes hovering and high speed flight by changing the angle of the wing (tilt). The problem addressed for the aircraft is the difficulty of the flight trajectory stabilization. Since the aircraft changes the angle of the wing, the dynamic change of the characteristics of the motion should be considered during the flight. To solve this problem and realize the flight stabilization from a view point of control engineering, we introduce the new indices called "region of attraction". With this indices, we evaluate stabilization and simultaneously optimize control methods and body structure to reduce the control effort.
- J. Nakamura, T. Horibe, S. Hara, and D. Tsubakino, Design Parameters Optimization of Quad Tilt-Wing Aircraft by Means of Quantitative Evaluation of Region of Attraction, The 53rd Kansai Branch-Chubu Branch Joint Autumn Meeting, D10 (2016) (in Japanese).
- S. Hara, H. Nagamatsu, J. Nakamura, T. Horibe, and D. Tsubakino, Flight Control of Quad Tilt Wing UAV and Its Stability Analysis by Region of Attraction, The 48th JSASS Annual Meeting, 1C08 (2016) (in Japanese).
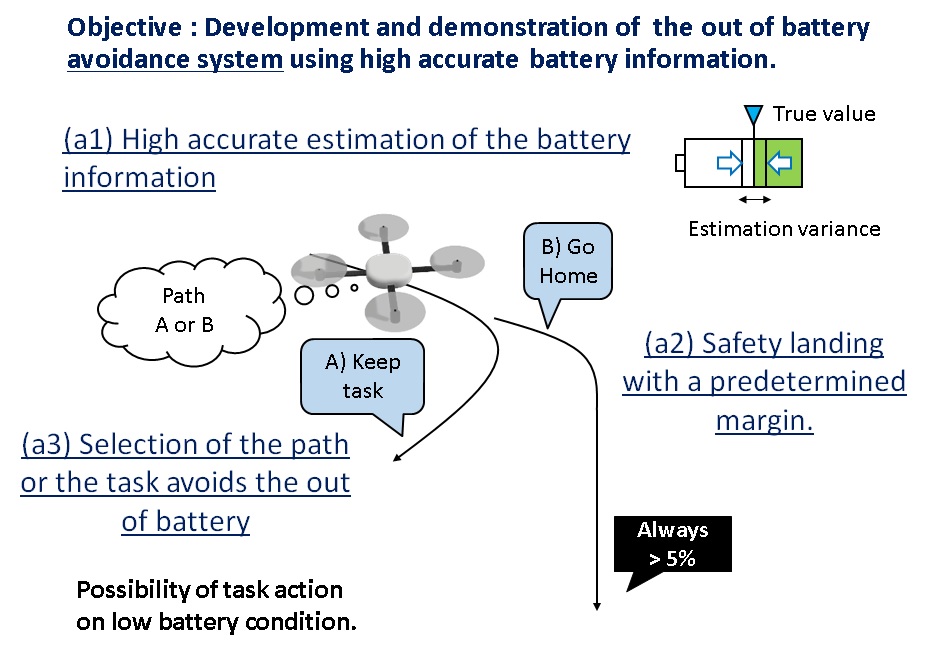
Study on Motion Control of Electric Vehicles
It is widely known that the electric vehicles well have been used in our society. One of the important themes for electric vehicle is the battery management. Previously, we cannot use the full abilities of the electric vehicles because of the uncertanty of the battery states. The state estimation method of batteries has been developed rapidly and now we can estimate the state of charge (SOC) with high accuracy. Our group aims to develop the effective motion control methods taking the recent battery management technique into account, especially in the UAV field. We aim to achieve the drastically extention of the cruising range only by improving the software of UAV.
- K. Kuwamura and S. Hara, Application of Battery Information to Effective Unmanned Aerial Vehicle Control,Tokai Engineering Complex 2017, 322 (2017).
Study on Settling Control of Horizontal Moving Body
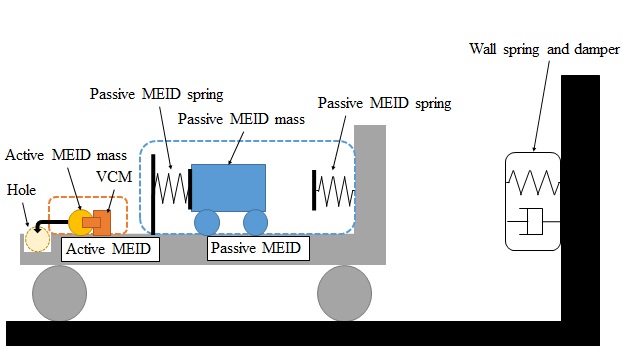
With the experience of the planetary landing mechanisms, our group treats settling control of horizontal moving bodys which is mainly realized by momentum exchange without using brakes. This technique is expected to save time for the transportation. In our group, the technique is exploitted to the mechanism which reduces the rebound of the horizontal moving body colliding with a wall and realizes the settling control.
|
|
- S. Hara, N. Mishima, and K. Kuwamura, Proposal of Horizontal Moving Body Settling Control Mechanism Mainly Realized by Momentum Exchange -Hybrid Mechanism Consisting of Passive MEID Deceleration and Active MEID Rebound Suppression-, The 17th SICE System Integration Division Annual Conference, 1209-1212 (2016) (in Japanese).
Study on a Trajectory Optimization of Spacecraft for Asteroid Deflection Exploiting Impact Geometry Map
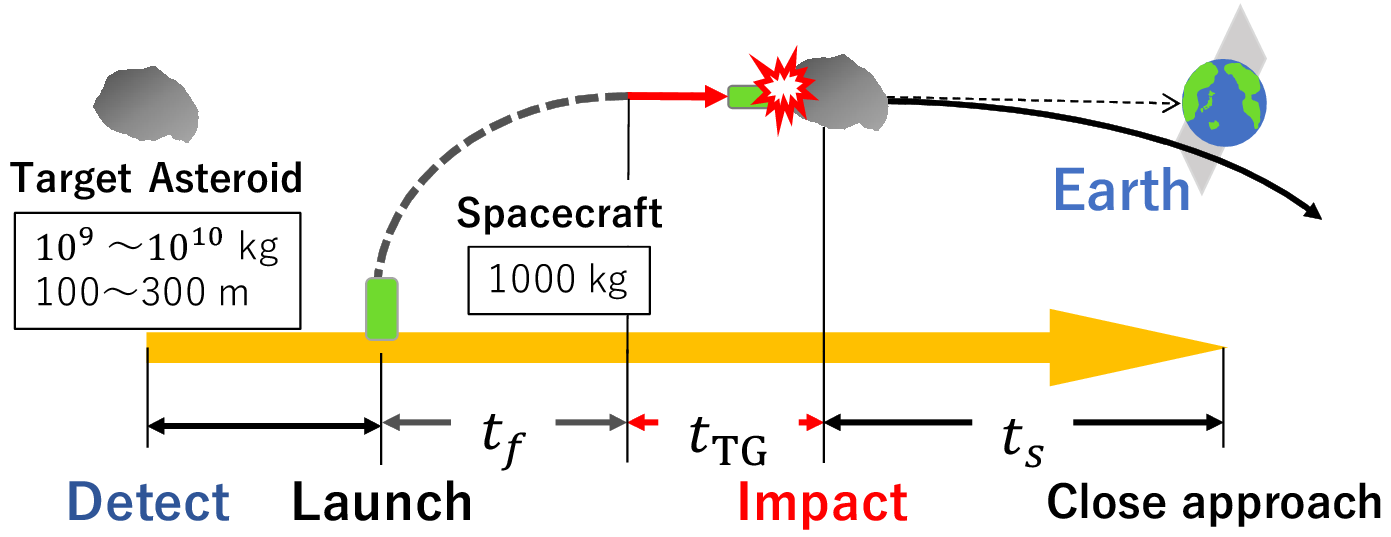
Collisions of asteroids with Earth sometimes occur and cause severe damage to human society. To mitigate this disaster, asteroid deflection techniques which avoid the collision by changing asteroid's path are discussed. Study on asteroid deflection techniques is uncommon in Japan, and still developing.
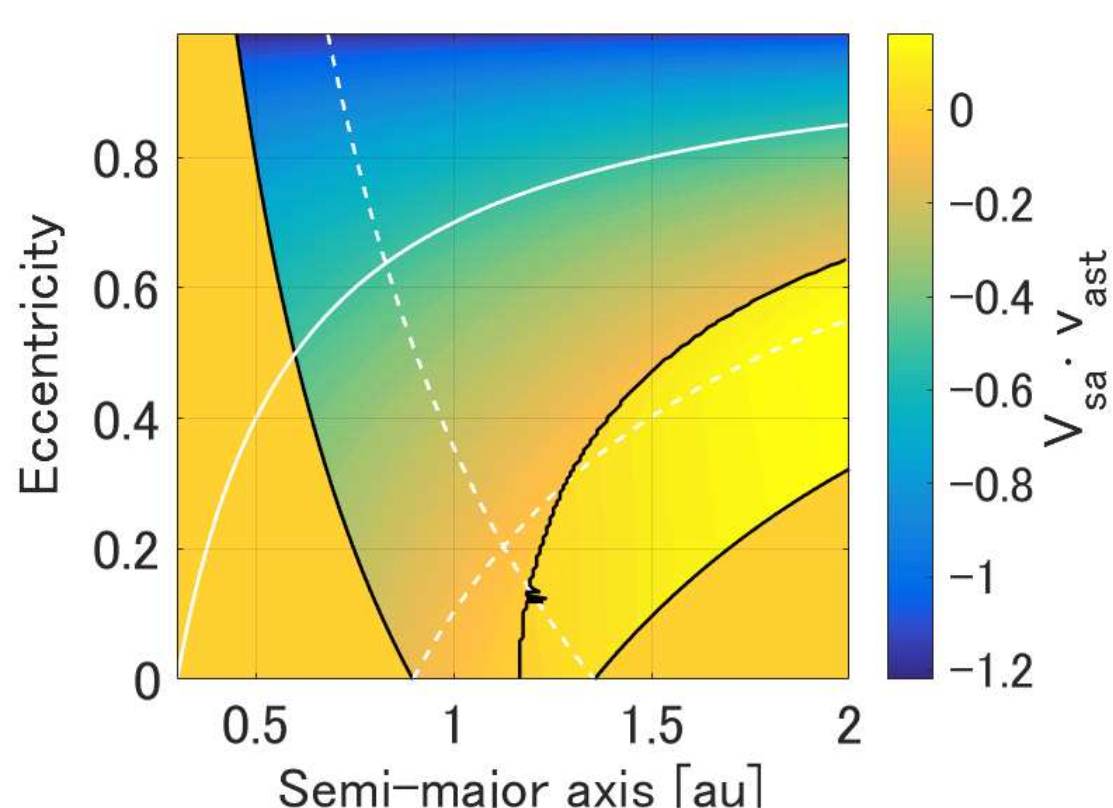
The Kinetic Impactor(KI) approach that sends a spacecraft to crash into an asteroid at hypervelocity in order to change its path is proposed as one of asteroid deflection techniques. Since there is an example that an impactor collided with a comet, this technique has high potential for practical use. Additionally, the KI method still has a possibility to improve focusing on impact effects. Impact Geometry Map(IGM) that visualize the achievable change in the asteroid orbital energy caused by the KI was proposed to evaluate the impact effects.
In this research, we propose a trajectory optimization method for the improvement of the KI by exploiting IGM in order to enhance the impact effects.
|
|
- R. Hayama, K. Yamaguchi, and S. Hara, Study on Trajectory Optimization Method of Spacecraft as an Impactor for Asteroid Deflection Exploiting Impact Geometry Analysis, The 26th Space Engineering Conference, 1A2 (2017) (in Japanese).
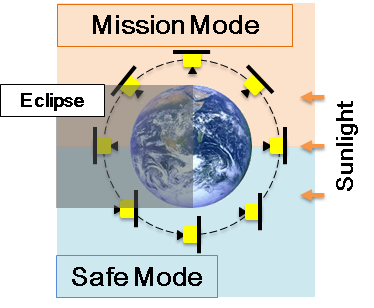
Autonomous Spacecraft Operation with Efficient On-board Operation Planning System
Recent years, research and development of microsatellites have become active, because of their low development cost and short development period. However, microsatellites have strict resource limitation from their launch mass and volume constraints. In addition, they tend to give priority to stable operation of the spacecraft and build the conservative operation plan with the excessive safety margin to the limited resources, which prevent enlarging the possibilities of the systems.
In this research, we are trying to implement the automation and autonomous functions that maximize the utilization of limited resources to enlarge the possibilities of microsatellites system. Especially, we focus on the construction of the power management system of the satellites to maximize the mission operation time with the combination of the accurate battery status estimation system and the efficient autonomous operation planning system.

|
|
- A. Takaki, K. Miyata, K. Yamaguchi, and S. Hara, Proposal of Effective Operation Method Specialized for Microsatellites in Low Earth Orbit, The 18th Space Science Symposium, P-162 (2018) (in Japanese).
- A. Takaki, K. Miyata, K. Yamaguchi, and S. Hara, A Study of Power Management Based on Battery State Estimation for Effective Operation of Microsatellites, The 49th JSASS Annual Meeting, 1D07 (2018) (in Japanese).
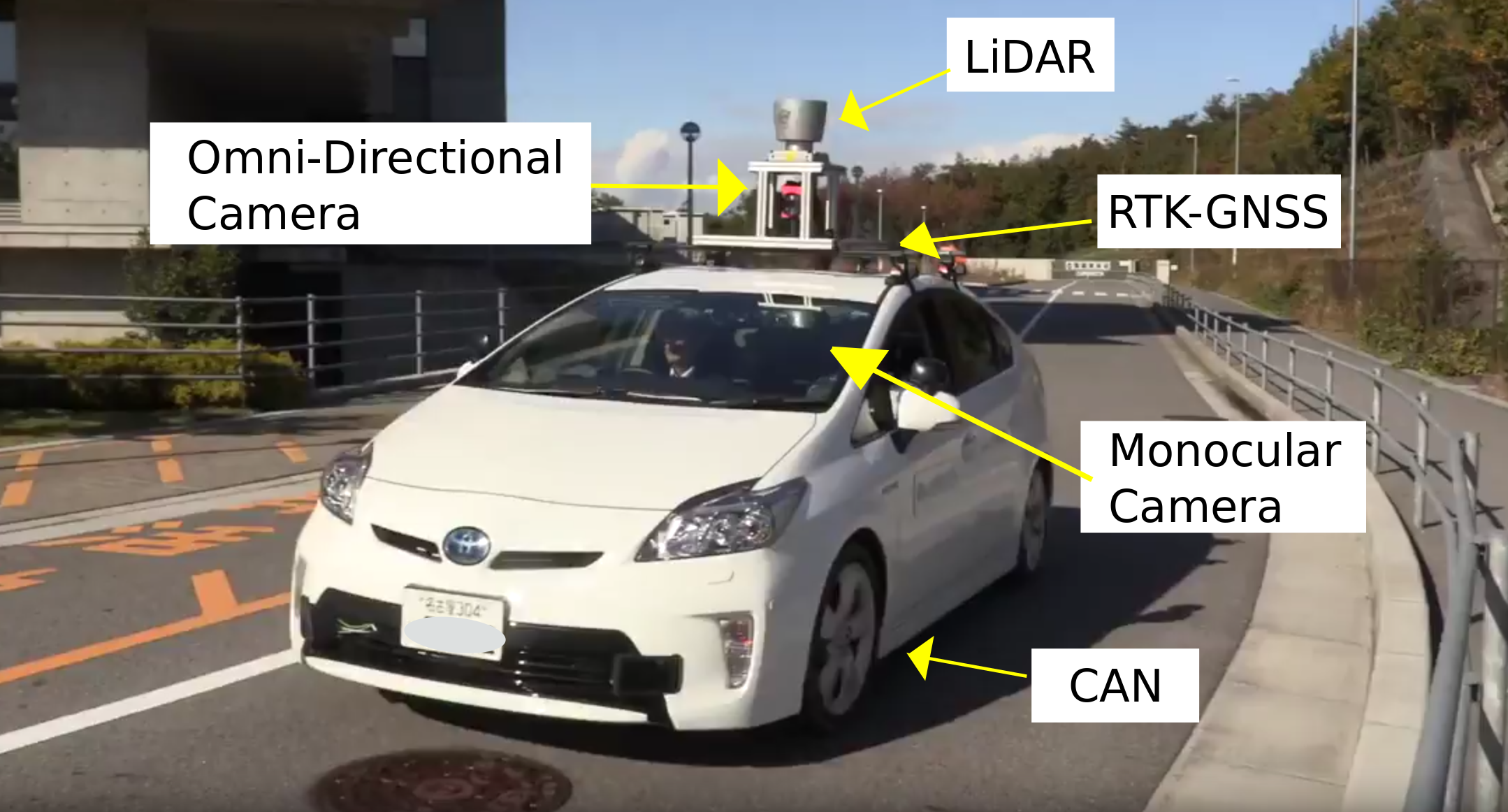
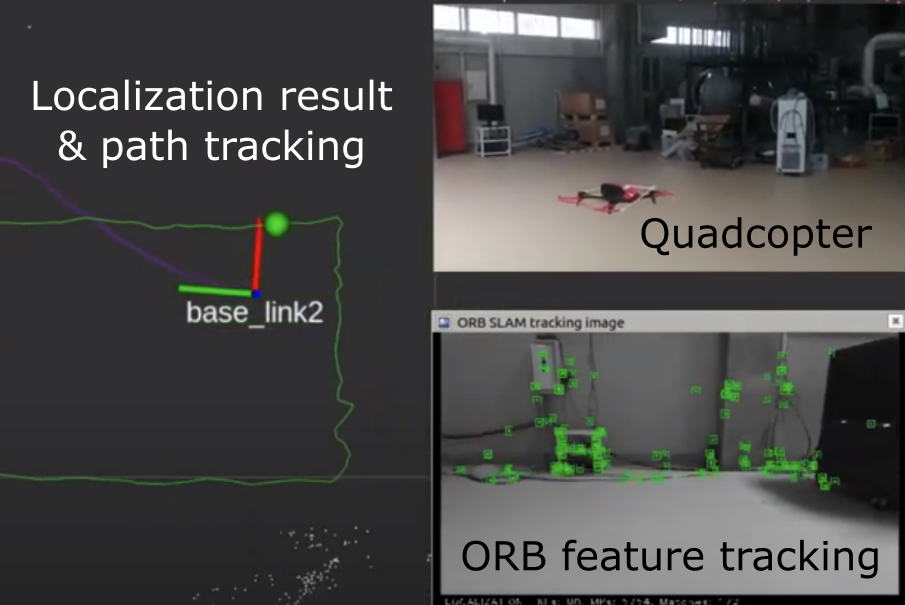
Autonomous Navigation of UAVs
We have studied and developed autonomous driving technologies and try to apply these technologies for autonomous UAV navigation now. These technologies include environment mapping (SLAM), pose estimation on a map (localization), obstacle detection and recognition, and path planning and following control. In particular, we are focusing on how we can apply machine learning techniques for their autonomous navigation to realize more intelligent flight. We are also studying technologies for ground mobile robots.
 |
 |
- N. Akai, Mobile Robot Localization Considering Uncertainty of Depth Regression from Camera Images, IEEE Robotics and Automation Letters, Vol. 7, No. 2, pp. 1431-1438 (2022).
- N. Akai, K. Yasui, K. Arashi, K. Saliou, D. Tsubakino, and S. Hara, Bayesian Filtering Fusion of Optimization-Based Monocular Visual Localization and Autonomous Quadcopter Navigation, In Proceedings of the IEEE/SICE International Symposium on System Integration (SII), pp. 754-759 (2022).