主な研究テーマ
宇宙機・航空機の運動と制御
「空の産業革命」の社会受容性評価に関する研究
近年,Urban Air Mobility(UAM)に関する技術が世界的に研究されている一方,UAMの社会受容性については十分に検討されていません.そこで,本研究グループでは,アンケートによる主観評価と簡易脳波計測にもとづくアナライザ(感性アナライザ)による客観評価を組み合わせ,UAMの社会受容性を評価可能なシミュレータの開発を目指しています.
この社会受容性評価シミュレータの開発において,本物のUAMとCGとの乖離は無視することはできません.本物のUAMの社会受容性を適切に評価するためには,本物のUAMとCGのディスクレパンシー(乖離)を小さくすることが必要になります.
本研究では,実際のUAMを用いた実験は困難であるため,ドローンを用いた模擬実験を行います.具体的には,感性アナライザを用いて実機ドローンとCGドローンの感性のディスクレパンシーを評価し,実機ドローンと同等の感性が評価が可能なシミュレータの開発を目指します.
- S. Hara, Y. Hayashi, Y. Mitsukura, and H. Kamide, Applicability of Kansei Analyzer for Noise-Induced Stress Assessment -Toward Social Acceptability Survey of Flying Cars-, Technical Journal of Advanced Mobility, Vol. 2, No. 3, pp. 31-41 (2021).
- 草野・福原・原・満倉・上出「脳波計測によるストレス解析のための実機とCGのドローンにおけるディスクレパンシー評価」次世代移動体技術誌, Vol. 6, No. 2, pp. 2-11 (2025).
搬送ロボットの自律・手動走行のシームレスな走行切り換えおよび旋回操作可能なパワーアシスト制御に関する研究
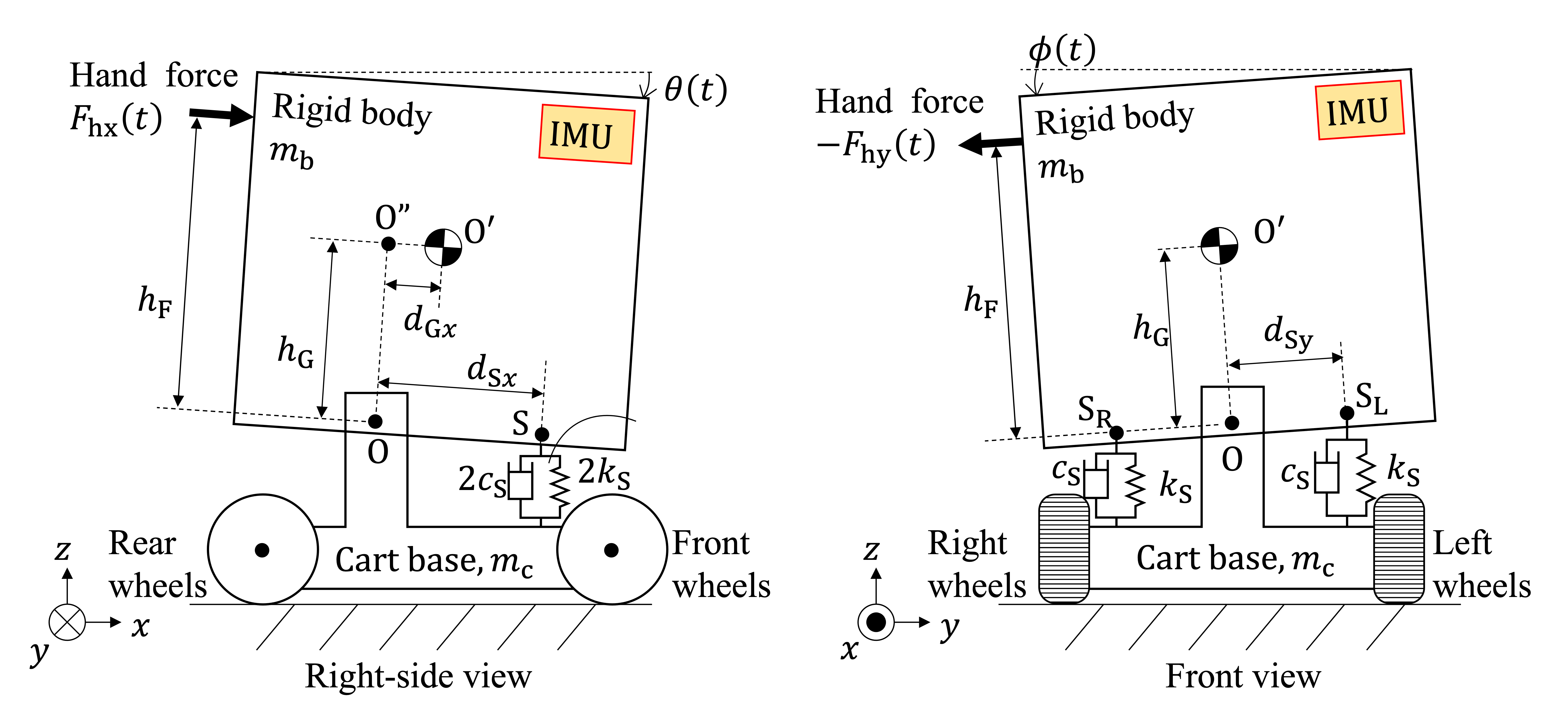
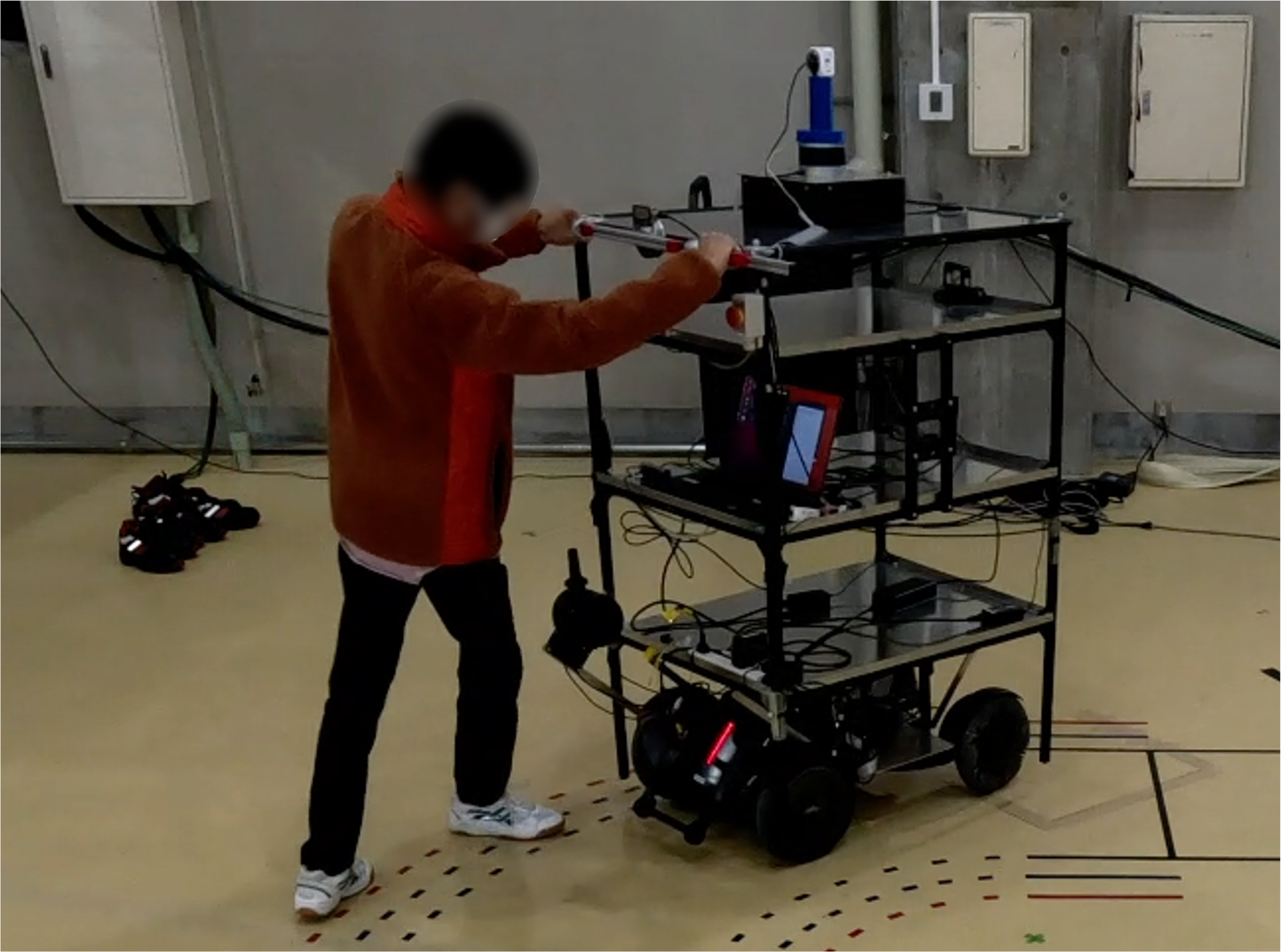
航空機製造拠点では扱う部品の種類が多く,保管場所や使用場所,またその搬送ルートが多岐にわたります.さらに,通路の整備が十分に行き届いていない場所がある場合,航空機製造拠点での従来の自律搬送車の利用が容易ではない状況となります.一方現場のニーズとしては,自律搬送車が完全自動で荷物の運搬を行うのみならず,任意の地点では作業者が搬送車を手動で操作したいという要求もあります.このような技術を実現するためには,自律走行中からシームレスに手動走行へ切り換える制御法,また手動走行中に前後移動や旋回が可能なパワーアシスト制御が必要となります.本研究では,下図に示すような機能を有した自律搬送ロボットの制御法に関する研究を行っています.

- N. G. M. Thao, S. Hirokawa, S. Hara, H. Okuda, M. Nagatsuka, N. Ogawa, and T. Suzuki, Introduction of a Manual Control Mode for Autonomous Mobile Robots to Transportation of Equipment in Manufacturing Sites of Aircraft Industry, Proceedings of the 2021 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO 2021), pp. 127-130 (2021).
- R. Sato, R. Nishida, S. Hara, H. Okuda, M. Nagatsuka, M. Tsuji, and T. Suzuki, Operability Evaluation of Manual Operation Control for Force-Sensorless Power-Assist Transport Cart, Mechatronics, Vol. 100, 103189 (2024).
月惑星探査のための探査機の着陸機構とその制御に関する研究
次世代の月惑星探査ミッションにおいて,月や火星へ着陸し天体表面を探査することは,極めて重要となっています.科学的に大変興味深い探査候補地(クレーターの中央丘やリム上,縦穴や渓谷など)の多くは,地形が急峻なため着地に対する難易度が高くなっています.今後の探査の実現には,これら厳しい条件下での探査機の転倒防止が大きな課題となっています.
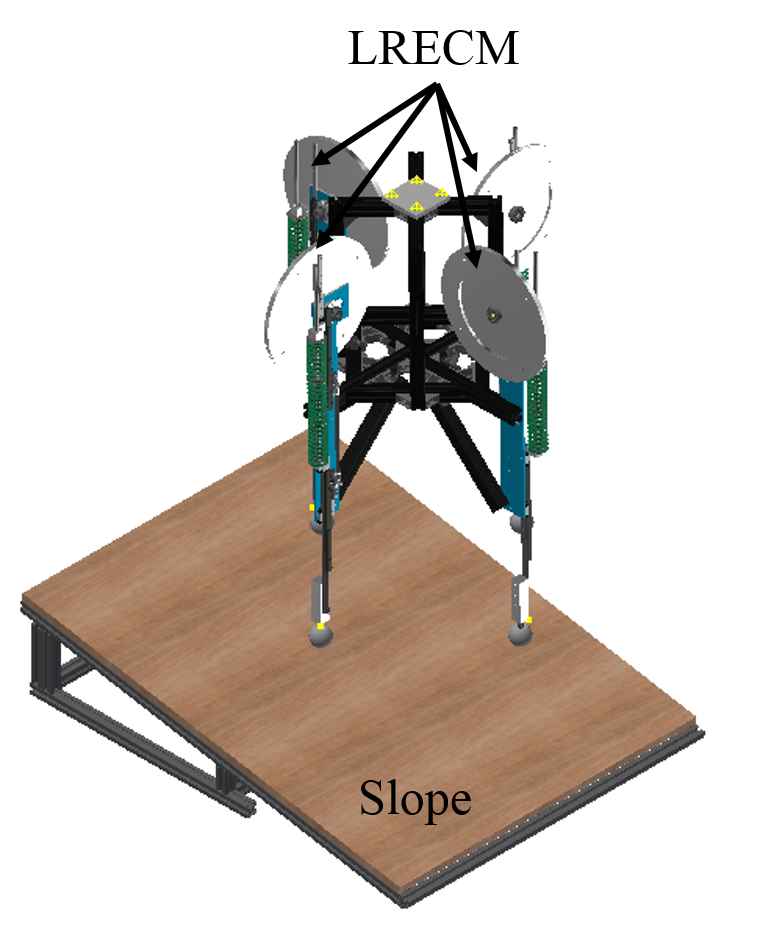
本研究グループでは,着陸時の衝撃吸収や転倒防止において運動量交換やエネルギー変換の観点に着目し,さまざまな方式の着陸機構とその制御に関する研究を行っています.
 |
 |
- 原・杉田・齋藤・前田・大槻「3次元エネルギー直動回転変換機構の自由落下着陸実験とシミュレーション」第17回宇宙科学シンポジウム, P-176 (2016).
- S. Hara, S. Saito, K. Sugita, and T. Maeda, Planetary Exploration Spacecraft Landing Gear with Three-Dimensional Linear-Rotary-Energy-Conversion Mechanism, The 31st International Symposium on Space Technology and Science, 2017-k-36 (2017).
- T. Maeda, T. Ozaki, S. Hara, and S. Matsui, Touchdown Dynamics of a Planetary Lander with a Translation-Rotation Motion Conversion Mechanism, Journal of Spacecraft and Rockets, Vol. 54, No. 4, pp. 973-980 (2017).
- 前田・原・尾崎・松井・大槻「並進回転運動変換機構を用いた月惑星着陸機の転倒抑制」計測自動制御学会論文集,Vol. 53, No. 5, pp. 319-326 (2017).
マルチコプタの着陸機構に関する研究
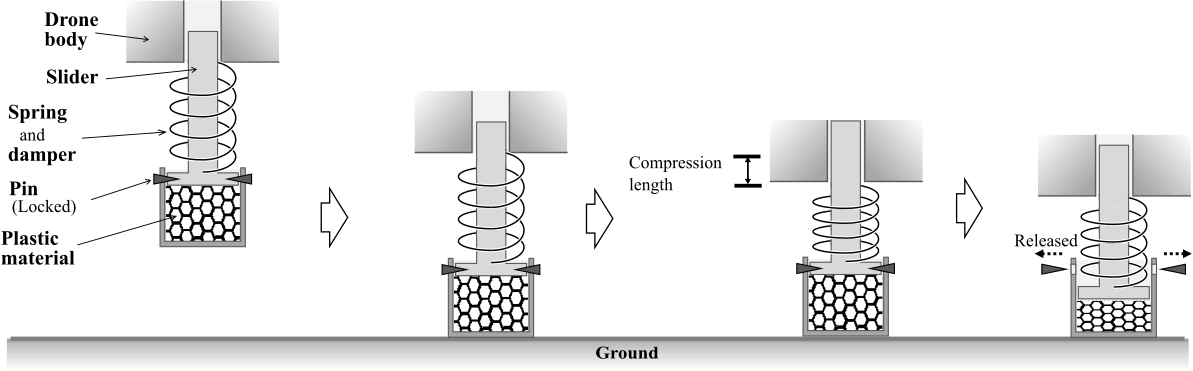
無人航空機(UAV)は、その簡便さとコンパクトさから、多くのアプリケーションで広く使用されています。日本の「空の産業革命」では、地方や都市内でUAVを使用して、災害時やパンデミック時にも配送システムを構築することを目的としています。この使命を成功させるには、UAVが異なる種類の地表や状況下で安全に着陸することが重要です。 この研究では、UAVの落下時に高い性能を発揮する緊急着陸システムを提案しています。このシステムは、プラスチック材料を介して直列に接続されたスプリング/ダンパーから構成され、機械式スイッチによってロックまたは解除することができます。低高度から落下する場合、スプリング/ダンパーシステムのみが使用され、着陸の衝撃が軽減されます。一方、高高度から落下する場合は、プラスチック材料も作動し、反発をより抑制することができます。このシステムは以下のように動作します。
- まず、機械式スイッチがロックされ、着陸時にはスプリング-ダンパーシステムが圧縮されます。
- スプリングの長さがしきい値に達すると、機械式スイッチが解除され、プラスチック変形部が変形し始めます。
- K. Niwa, S. Hara, and K. Miyata, Development of Landing Rebound Reduction Mechanism Utilizing Magnetic Damper for Multicopters, Journal of Robotics and Mechatronics, Vol. 33, No. 2, pp. 223-230 (2021).
- P. Li, R. Sato, M. Hasegawa, and S. Hara, Fundamental Study on Adaptive Shock Response Control for Emergency Landing of UAVs and Its Experimental Investigation, IEEJ Journal of Industry Applications, Vol. 13, No. 2, pp. 135–145 (2024).
- P. Li, R. Sato, and S. Hara, Analytical and Experimental Study on a Versatile Landing System with Shock Response Mechanism, Aerospace Science and Technology, Vol. 157, 109807 (2025).
固定翼UAVによる低速降下物体の空中回収に関する研究
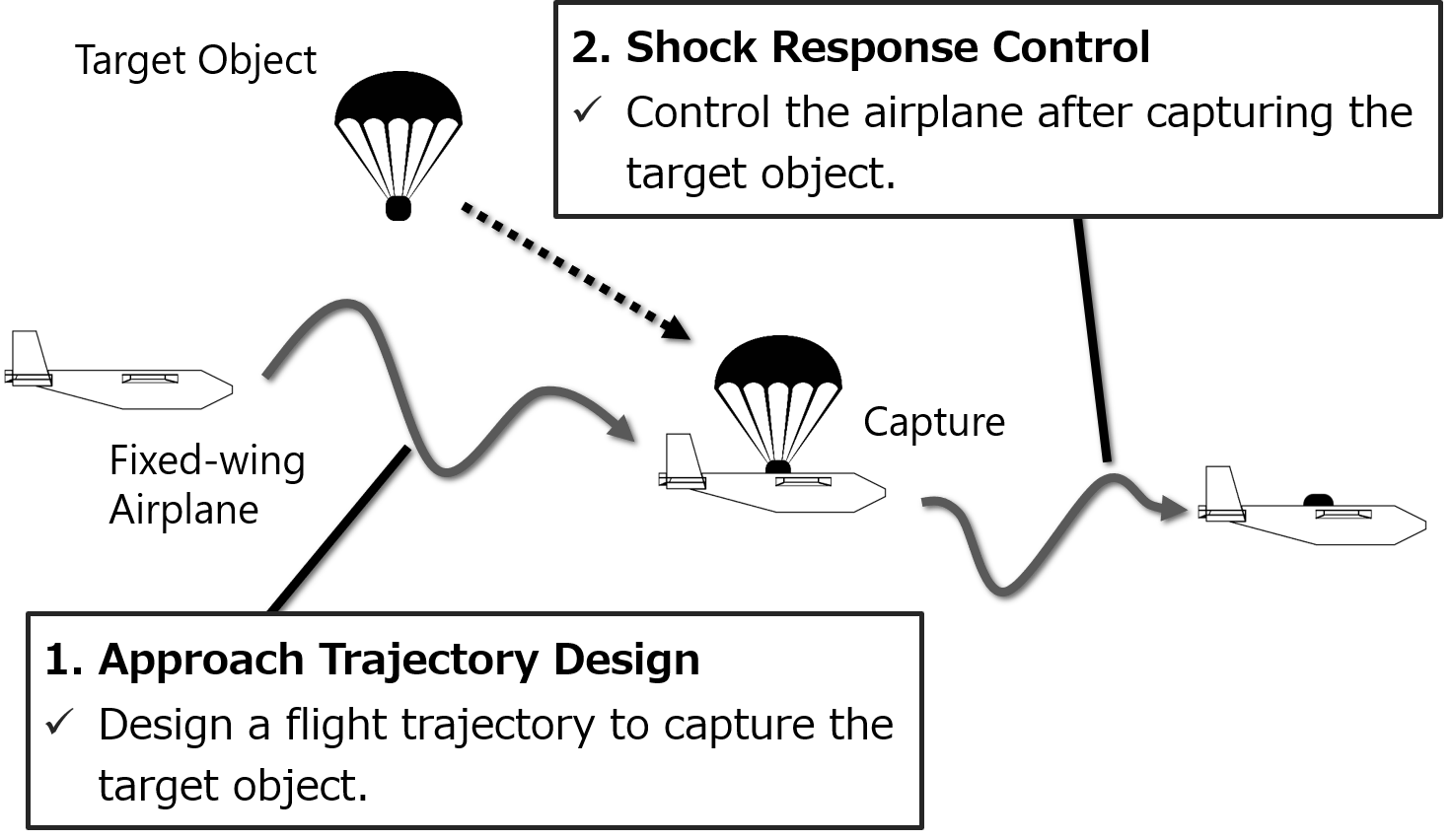
落下先の物体や人身に対する危険の回避を目的としたパラシュート等による減速降下は,航空宇宙分野において広く利用されています.例えば,気象観測用気球などは観測終了後にパラシュートを展開し,低速降下しています.しかしながら,落下地点の制御が困難であり,降下物体の減速が不十分になる可能性があるといった課題があるため,不慮の事故発生の恐れが存在します.また,それを避けるために,現在は降下地点を海などの無人地帯とすることが多いのですが.海などの無人地帯での機材の回収は難しいため,その機材は投棄が基本となってしまっています.
本研究では,この課題を解決するために,低速降下物体を固定翼無人航空機(Unmanned Aerial Vehicle: UAV)により空中で回収するための制御手法について検討します.
- S. Takeuchi, S. Nakamura, S. Hara, and K. Miyata, Updating Final-State Control Methods Taking Input Constraints at Final Time Into Account (Adaptive Flight Trajectory Design of Fixed-Wing UAVs), Journal of Advanced Mechanical Design, Systems, and Manufacturing, Vol. 14, No. 7, JAMDSM0106 (2020).
自動二輪車の自立安定化に関する研究
四輪以上の輸送用機器と比べ,自動二輪車は非常に安定性が悪く,特に低速時や停止時で不安定性が顕著になります. 自動運転化などにより安全化が進む交通社会において,自動二輪車においても安全性を向上させることが求められます.
本研究グループでは,ヤマハ発動機株式会社と共同研究を行い,前輪とハンドル部分にそれぞれモータを装着した二輪車の低速走行における自立安定化制御を研究しています.車体の運動をモデル化し,LQR制御器設計とベイズ最適化を組み合わせることで,適切な重みパラメータを選択し,ハンドル操舵による二輪車の自立安定化を達成しました.今後は操舵だけでなく駆動トルクの加減速による制御も行っていきます.
- S. Hara, M. Tsuchiya, T. Kimura, and N. Akai, Experimental Study on Low-Speed Control for Motorcycles Using SPACAR Model and Gain-Scheduling Control, J. Electr. Eng. Technol., Vol. 18, No. 3, pp.2221-2230 (2023).
- K. Muto, S. Hara, D. Koudu, T. Murakami, S. Akama, and D. Tsubakino, Efficient Controller Design Using Bayesian Optimization for Low-Speed Motorcycles Stabilization, Proceedings of the 11th IEEJ International Workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON 2025), pp. 280-285, (2025).
倒立振子制御のための遠隔実験システムの構築
新型コロナ禍において,大学の授業の多くがオンラインでの実施に切り換えられました.その中でも実験をともなう授業はオンライン化が難しく,中止せざるを得ない授業もありました.そこで本研究では,実験授業の1つとして倒立振子の制御に関するテーマを取り上げ,これをリモート化するシステムの確立を目指します.最終目標としては,監督者と受講生それぞれの遠隔地点にある倒立振子の同時安定化の達成を目指し,対面型の学生実験の雰囲気で同時に実験を行うことを目標としています.このシステムは学生実験に留まらず,遠隔での製品デモンストレーションなどに応用することが期待されます.
動画では,名古屋大学と岐阜大学にそれぞれ1台ずつ設置された,約50km離れた2台の倒立振子を用いた安定化制御の様子を示しています.両大学に設置された振子は,インターネットを介して互いの情報を交換します.階層化最適制御法を利用して設計した制御系によって,評価関数の重みを変更するのみで個別の振子の安定性と2つの振子の協調性のどちらを重視するのかを決定できます.今後,通信遅延やパラメータ変動などの構造的不確かさ,残余振動モードなどの非構造的不確かさに対するロバスト性を向上させる予定です.
- S. Hara, Y. Kurasaki, D. Tsubakino, and K. Ito, Simultaneous Experimental Classes in Multiple Universities Using Simultaneous Stabilizing Control of Internet-Connected Multiple Inverted Pendulums, Transactions of the SICE, Vol. 61, No. 1, pp. 2-11 (2025) (in Japanese).
小惑星フライバイにおける追尾撮像システムに関する研究
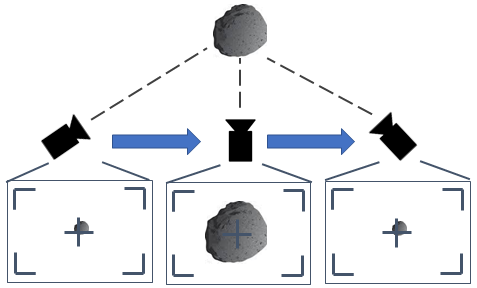
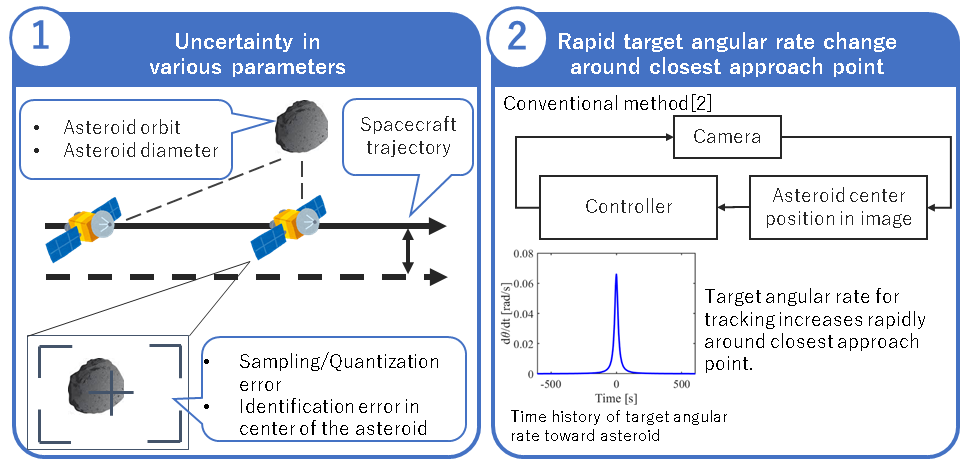
近年,フライバイ探査の低コスト化・観測機会の拡大のため,小型衛星を用いたフライバイ探査が注目されています.小型衛星を用いたフライバイ探査では搭載可能なイメージャの制約から,高精度なデータを取得するために最接近距離の短縮・相対速度の増加が必要となり,より高速で高精度な追尾が求められます.観測機器の視野方向のみを制御する駆動鏡を用いて目標を追尾しますが,高速で高精度に追尾するためには,アクチュエータのモデル化誤差や温度依存による性能変動,画像処理の遅延 ・計算コスト,光学条件など,さまざまな誤差要因を抑えることが必要です.本研究では,これらの問題に対応可能な制御システムの構築を目指します.
- K. Miyata, S. Hara, K. Hayashi, K. Seki, and M. Iwasaki, Comparisons of Vision-Based Target Tracking Methods for Asteroid Flyby Problem, Proceedings of the 8th IEEJ International Workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON 2022), pp. 107-112 (2022).
宇宙機器用アクチュエータシステムの提案
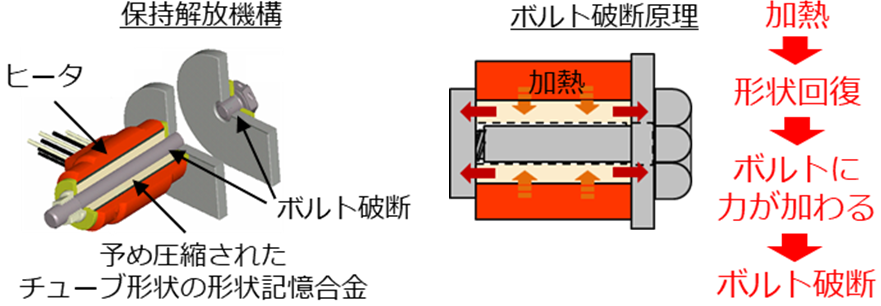
機器放出やロック機構の解放など,宇宙では所望のタイミングで決められた大きな力を発生する需要があります.従来は火薬などの火工品が用いられてきましたが,近年,火工品の代替品として形状記憶合金を用いた宇宙機器が注目されています.形状記憶合金とは熱を加えることで変形した形状が元の形状に戻り,その際に力を発生するという材料です.
本研究では,図に示すような対象物をボルトで保持して形状記憶合金をヒータで温めることによりボルトを破断させ保持を解放するという装置を取り扱っています.この機器は熱で駆動するため温めるのに時間がかかり保持を解放するタイミングの誤差が大きいという課題を有します.
本研究グループではこの機構の数理モデルを構築し,ヒータの入力電圧を制御することによってこのタイミングの誤差を小さくすることを目指しています.
- M. Nozaki, K. Miyata, S. Hara, and M. Otsuki, A Robust Control System Against Temperature Variance for Space-Use SMA Actuators, Journal of Spacecraft and Rockets, Vol. 59, pp. 1062-1073 (2022).
複雑ダイナミクスと制御理論
Complex Dynamics and Control Theory (CDCT)
以下の研究テーマは講師の椿野とその指導学生によって行われています.お問い合わせは椿野までお願いいたします.
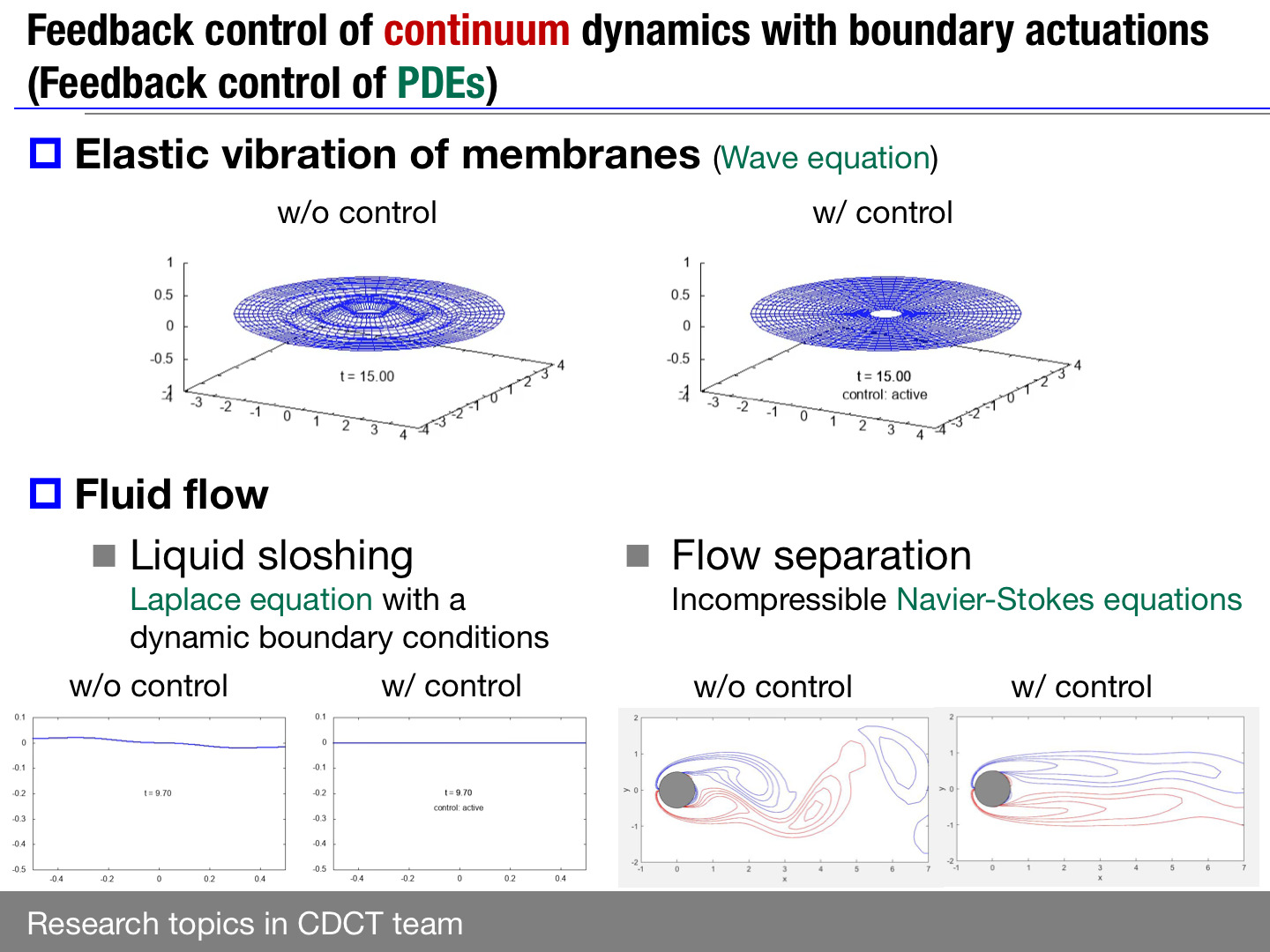
連続体現象・物理場の制御
液体燃料タンク内における燃料の振動や物体周りの流れ場で生じる現象,さらには人工衛星における太陽電池パドルや膜構造体の振動といった弾性体で生じる現象は,その動特性が偏微分方程式によってモデル化されます.その結果,制御対象としては非常に扱いにくいものになり,その制御手法について多くの課題が残されています.この困難な問題に対して我々のグループでは,物理的な性質や状態変換,機械学習をうまく用いた系統的な制御器設計法について研究しています.
最近の結果
- 椿野「スロッシング制御に向けた波動方程式とスカラ方程式の単一入力による漸近安定化」第21回計測自動制御学会システムインテグレーション部門講演会 (2020), 優秀講演賞受賞.
- Y. Sasaki and D. Tsubakino, Design of Observers for the Flow around a Cylinder using Machine Learning Techniques,Proceedings of the SICE Annual Conference 2020, pp. 1355-1360 (2020), SICE Annual Conference Young Author’s Award 受賞.
- 佐々木・椿野「モデル予測制御と回帰分析に基づく流体場のフィードバック制御器設計」 計測と制御, Vol. 59, No. 8, pp. 546-551 (2020).
- Y. Sasaki and D. Tsubakino, Designs of Feedback Controllers for Fluid Flows Based on Model Predictive Control and Regression Analysis, Energies 13, No. 6, 1325 (2020).
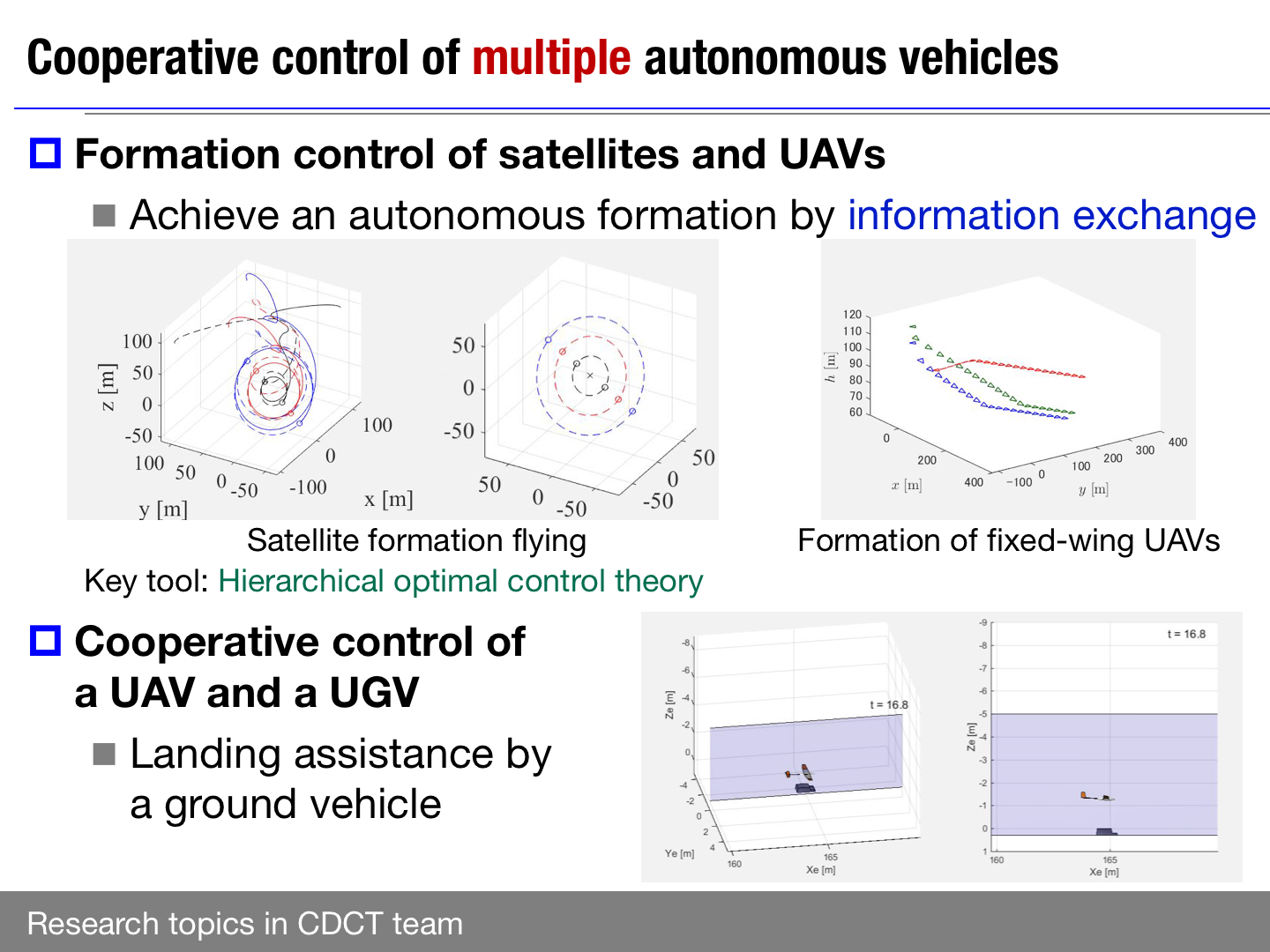
複数移動体に対する自律協調制御
複数の人工衛星,航空機,車両などの移動体に対して,個々の移動体が周囲と協調しながら自律的に目標を達成するために,どのように行動すれば良いかの意思決定を行うための方法論を研究しています.特に,集団としての舞いに対する評価と,個々の移動体の運動の評価のように,システム全体に階層的な評価を導入した,階層化最適制御論を用いたアプローチを採用しています.複数の人工衛星のフォーメーションフライトを用いたミッションや,複数無人航空機,複数ローバによる科学観測や探査などへの応用を目指しています.また,航空機と車両のように異なる種類の移動体を併用したシステムの検討も行っています.
最近の成果
- H. Yamaguchi and D. Tsubakino, Satellite Formation Control Based on Event-Triggered Optimal Regulation of Two-Layer Performance Outputs, Proceedings of the 71st International Astronautical Congress 2020 (IAC 2020).
- Y. Kamitani and D. Tsubakino, Formation Control for Multiple Quadrotors Based on Optimal Regulation of Individual and Cooperative Performance Outputs, Proceedings of the 3rd International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2019), Best student award 受賞.
- Y. Fukuda and D. Tsubakino, A Control Law for a Quadrotor to Land on a Running Ground Vehicle Under Input Constraints, Proceedings of the SICE Annual Conference 2019 (SICE 2019).
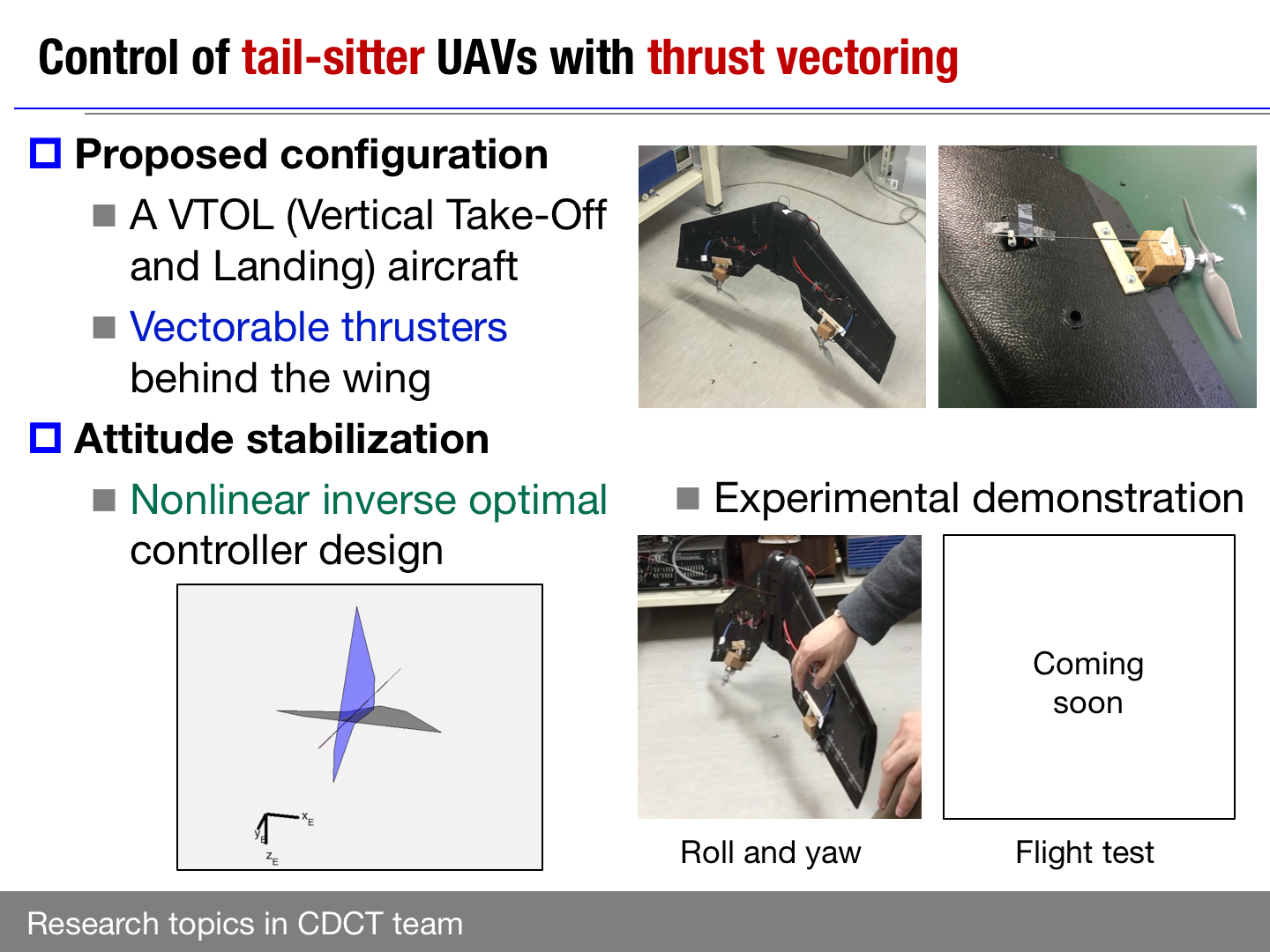
無人固定翼航空機の制御
小型無人航空機は,人が乗っていないことや人が操縦しないこと,さらには軽量であることから通常の旅客機にない多くの可能性を秘めています.我々の研究グループでは,長い航続距離を生かしつつ様々なミッションが可能となるように,固定翼航空機の可能性を広げることを目指します.制御がより主体的になる新しい機体形状の設計や,非線形制御を代表とする最先端の制御理論を駆使した,従来にない飛行形態の実現に向けて,研究を進めています.
最近の結果
- 太田「推力偏向による舵面を用いない小型Tail-Sitter UAVの水平飛行制御」第56回飛行機シンポジウム (2018), 学生優秀講演賞受賞.
- K. Miyazaki and D. Tsubakino, Nonlinear Hovering Control Laws for Small Vectored-Thrust Tail-Sitter UAVs, Proceedings of the 1st IEEE Conference on Control Technology and Applications (CCTA 2017).
過去のテーマ
本研究グループで行っていた過去のテーマになります.飛翔体制御に関する研究
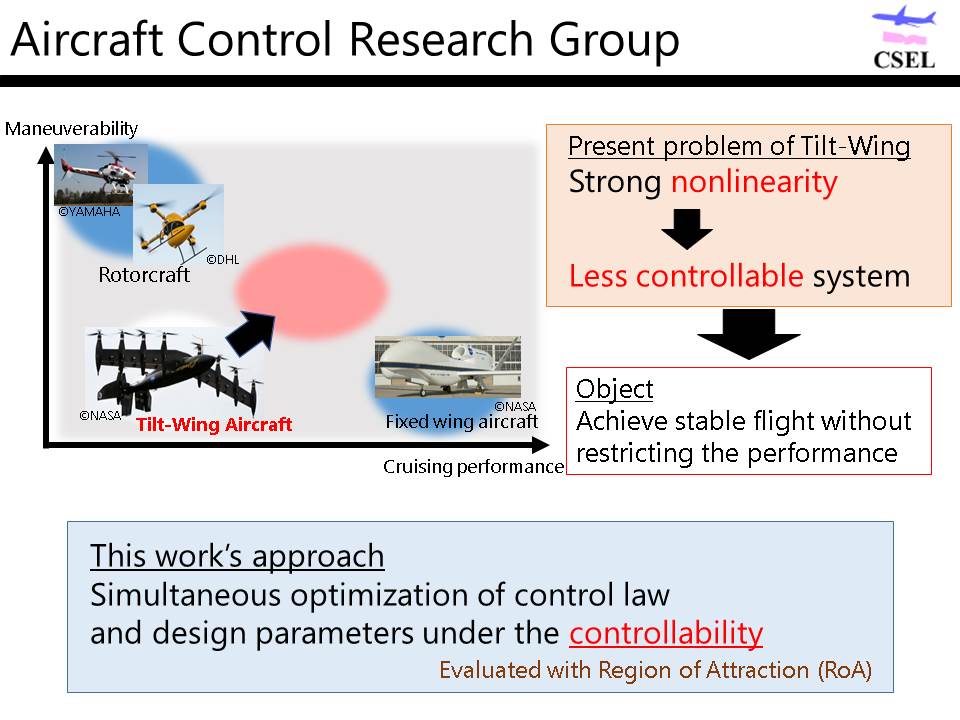
近年台頭してきた無人航空機は,物資輸送をはじめとした様々なミッションへの適用が期待されています.特に,滑走路が無い離島間の輸送や,より広範囲かつ高精度な環境観測などの実現には,ヘリコプターのような空中静止能力と旅客機のような高速飛行能力を併せ持つことが望まれます.
垂直離着陸機はそれを実現する機体として注目されており,本研究ではその中でもTilt-Wing機と呼ばれる機体を対象に研究を行っています.この機体はプロペラを装備した翼全体の角度を変更(Tilt : ティルト)することで空中静止と高速飛行を実現します.しかし,飛行中に機体の運動特性が大きく変わるため,飛行安定化が難しいという問題があります.
本研究は制御工学の観点からこの問題に取り組みます.「吸引領域」と呼ばれる安定化を評価する新しい指標を取り入れ,制御則および機体構造を「制御しやすい」ように同時に最適化することで,安定飛行の実現を目指します.
- 中村・堀部・原・椿野「吸引領域の定量的評価に基づくQuad Tilt-Wing機の設計パラメータ最適化」日本航空宇宙学会第53回中部・関西支部合同秋期大会,D10 (2016).
- 原・永松・中村・堀部・椿野「4発ティルトウィングUAVの飛行制御と吸引領域による安定性評価」日本航空宇宙学会第48期年会講演会,1C08 (2016).
電動ビークルの運動制御に関する研究
電気自動車を始めとする電動ビークルの課題の一つは,真に効率的なバッテリ運用です.従来はバッテリの状態量がわからないことから保守的な運用をしており,その能力を生かし切ることができていませんでした.しかし近年,数理モデルを用いたバッテリ状態の推定法が開発されており,高い精度でバッテリ情報を知ることができるようになりました.本研究グループでは,このような最新のバッテリマネジメント技術を積極的に考慮した電動ビークルの運動制御について研究しています.電動ビークルの中でも特にペイロードの制約が厳しくバッテリ搭載量に制限がある無人航空機の分野において,ソフトウェアの改良のみによる大幅な航続距離の延長を目指しています.
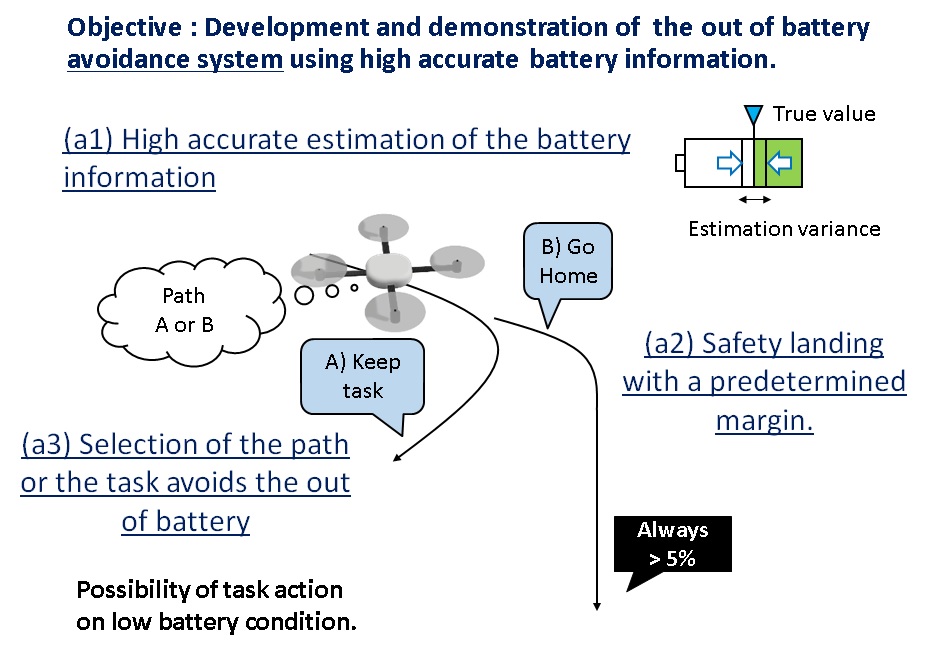
- K. Kuwamura and S. Hara,Application of Battery Information to Effective Unmanned Aerial Vehicle Control,日本機械学会東海支部第66期総会・講演会,322 (2017).
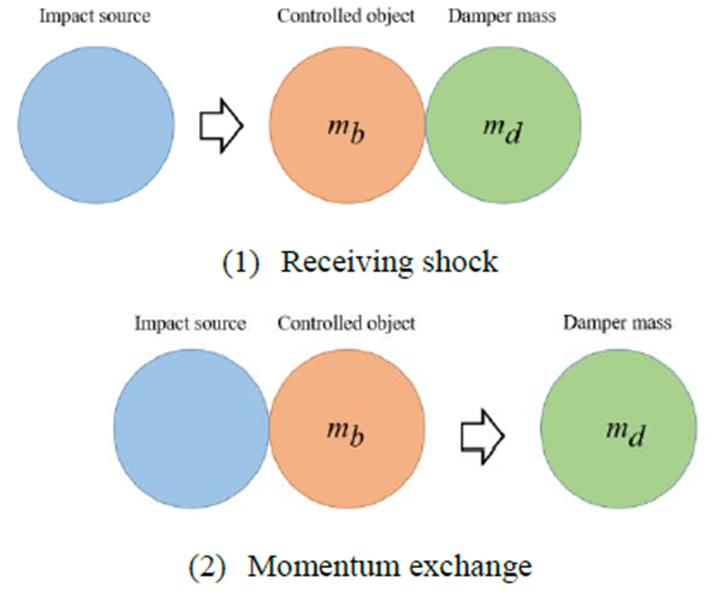
水平移動体の静止制御に関する研究
下図のビリヤードの例では,左端の玉が保有する運動量が中央の玉を介して右端の玉に伝わり,右端の玉が打ち出され,左端の玉が静止します.本研究ではこのような運動量交換を主体として,ブレーキを極力使用せずに水平移動体を静止させることを目指しています.この手法を物品搬送などに応用することにより,搬送時間の短縮やエネルギーの有効利用などの効果を得ることが期待されます.
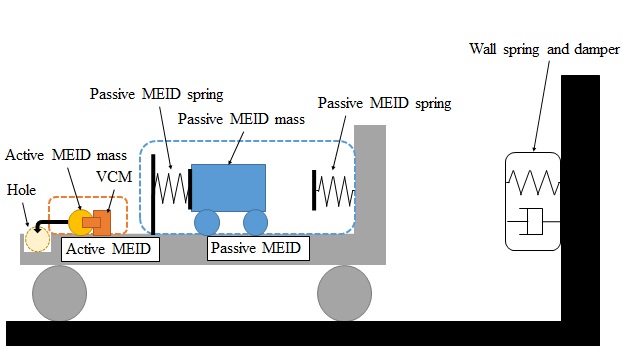
本研究グループが着陸探査機の分野で提案してきた機構と制御を応用して,水平移動体を壁に衝突させることを仮定し,リバウンド抑制・静止を実現する機構に関する研究を行っています.
|
|
- 原・三島・桑村「運動量交換を主体とした水平移動体静止制御機構の提案 -パッシブMEIDによる減速とアクティブMEIDによるリバウンド抑制のハイブリッド機構-」第17回計測自動制御学会システムインテグレーション部門講演会,1209-1212 (2016).
Impact Geometry Map を用いた小惑星衝突機の軌道最適化手法に関する研究
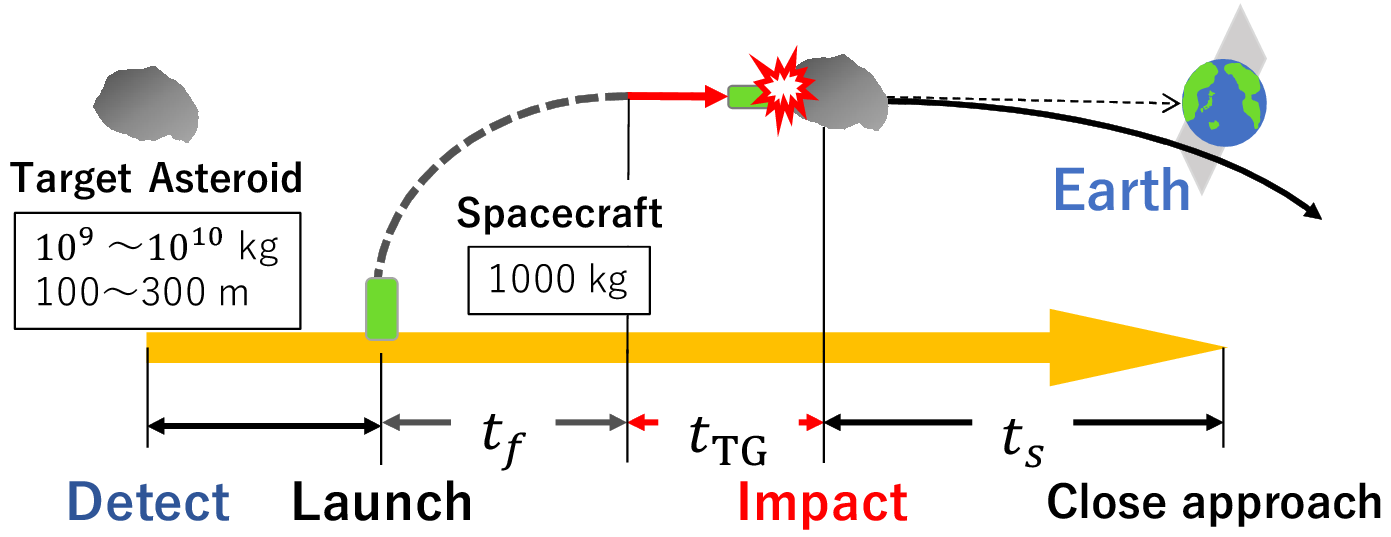
小惑星の地球衝突は,発生頻度は少ないものの人間社会に甚大な被害を及ぼす自然災害です.この災害に対して,小惑星の軌道を変えることで地球衝突を回避することが検討されています.小惑星の軌道変更手法に関する研究は国内では珍しく,まだまだ発展途上です.
軌道変更手法の1つに,宇宙機を小惑星へと衝突させることで軌道を変えるKinetic Impactor(KI)が提案されています.KIは,実際に彗星に衝突体を打ち込んだ例もあることからも高い実現可能性をもつとされていますが,宇宙機の衝突効果に着目することでさらなる効率化が期待できます.
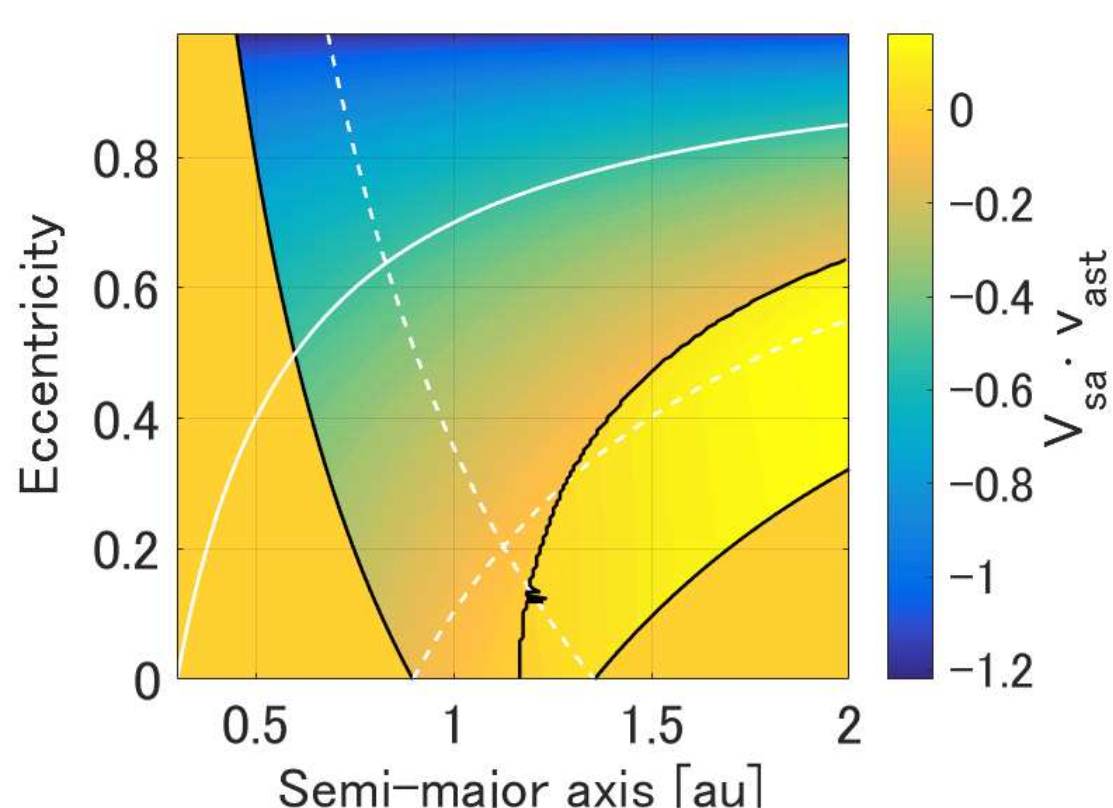
宇宙機の衝突効果の評価に関して,KIにより達成可能な小惑星軌道エネルギー変化を可視化したImpact Geometry Map(IGM)と呼ばれる解析図が考案されています.IGMを利用することにより衝突効果の大きい軌道へと宇宙機を投入することが可能です.
本研究ではIGMを利用することで,衝突効果を増大するための軌道最適化アルゴリズムを提案し,KIの効率を向上させることを目指しています.
|
|
- 羽山・山口・原「インパクトジオメトリ解析を用いた小惑星衝突機の軌道変更手法に関する研究」第26回スペース・エンジニアリング・コンファレンス,1A2 (2017).
高効率運用を実現するための宇宙機自律化システムの提案
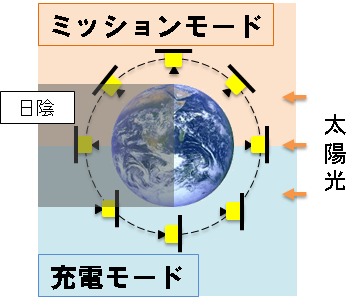
近年,開発期間が短く費用対効果が高いという特徴から超小型人工衛星の研究開発が国内外で活発化しています.しかし,小型・軽量であるため搭載可能なリソースが限られています.
さらに現状では,宇宙機全体の安定運用を最優先し保有リソースに対し過剰な安全余裕を持つ保守的な機器運用を行う傾向もあり,これらがシステムの高度化を妨げています.
本研究では限られたリソースを最大限に活用可能にする自動化・自律化機能を実装し超小型人工衛星のシステム高度化を目指しています.
現在は特に衛星の電源管理に着目し,バッテリの状態推定と運用計画を組合せ,機上で自律的な判断を実現することによるミッション運用時間の最大化を検討しています.

|
|
- 高木・宮田・山口・原「低軌道周回型超小型人工衛星に特化した効率的運用手法の提案」第18回宇宙科学シンポジウム,P-162 (2018).
- 高木・宮田・山口・原「超小型人工衛星の効率的な運用を目的としたバッテリ状態に基づく電源管理に関する一研究」日本航空宇宙学会第49期年会講演会,1D07 (2018).
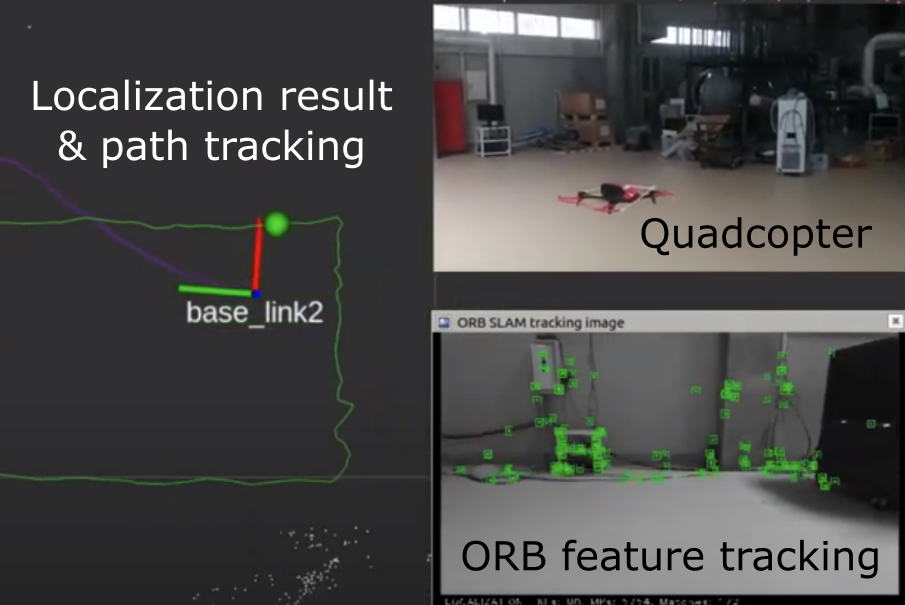
UAVの自律飛行
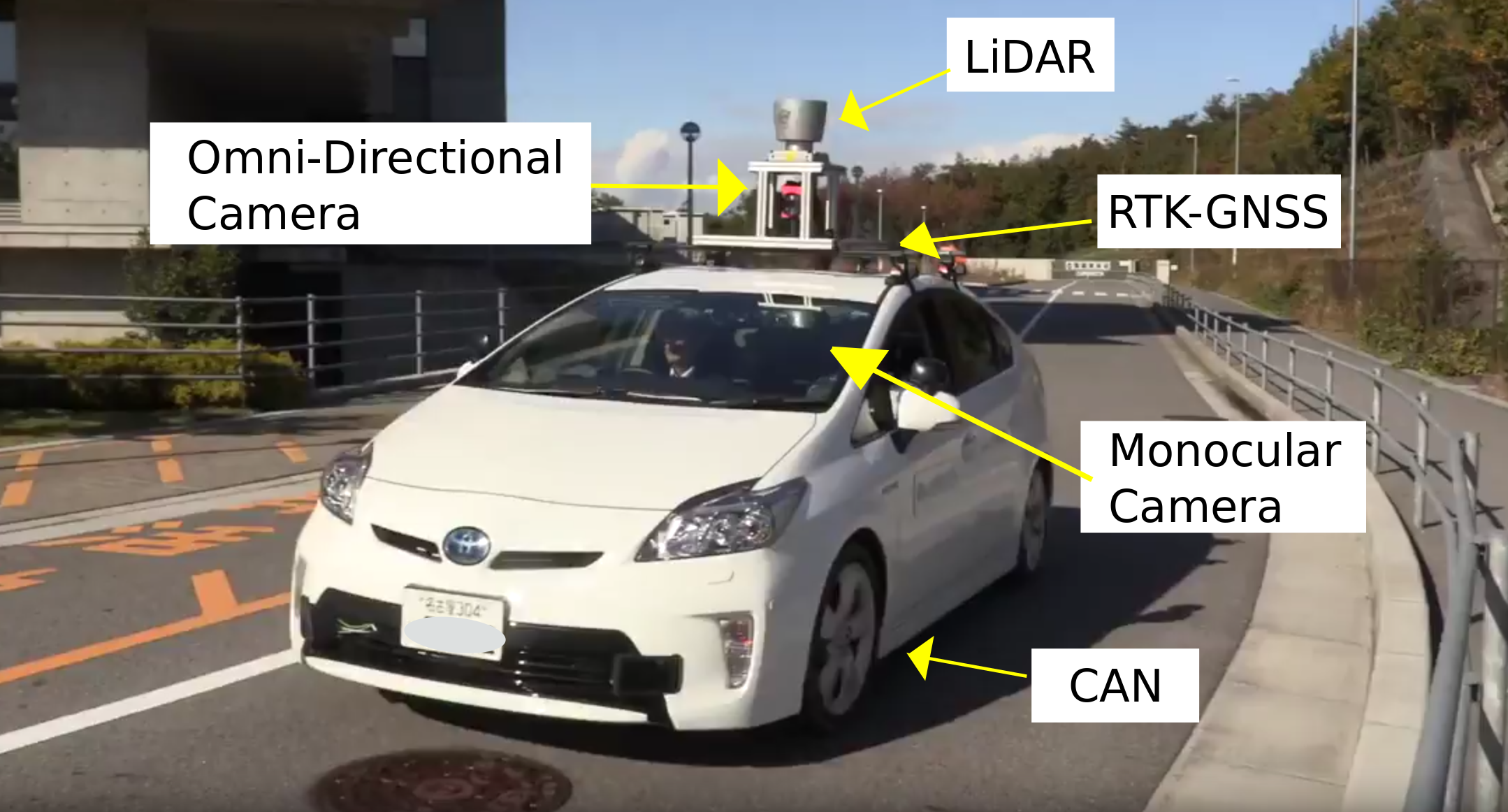
自動運転で培って来た知能化技術を基にして,現在は主にクアッドコプタを対象としたUAVの自律飛行に関する研究を行っています.UAVが飛行する環境の地図構築(SLAM),構築した地図上での位置の認識(自己位置推定),実世界を安全に自律移動するための障害物検知・認識,また経路計画や飛行制御など全般を研究対象としています.特に機械学習技術の取入方に焦点を当て,従来達成が困難であったナビゲーション技術を確立させることを目指しています.もちろん,自動走行などの地上モビリティに関する研究も継続しています.
 |
 |
- N. Akai, Mobile Robot Localization Considering Uncertainty of Depth Regression from Camera Images, IEEE Robotics and Automation Letters, Vol. 7, No. 2, pp. 1431-1438 (2022).
- N. Akai, K. Yasui, K. Arashi, K. Saliou, D. Tsubakino, and S. Hara, Bayesian Filtering Fusion of Optimization-Based Monocular Visual Localization and Autonomous Quadcopter Navigation, In Proceedings of the IEEE/SICE International Symposium on System Integration (SII), pp. 754-759 (2022).